Have you been striked in the face or naked parts of the body by relatively larger insects guys , even with speed much lower than 100 mph ? I have ( and the expirience isn't pleasent )but haven't been striked by bird yet and probably that's why still alive .
Manolis - the big difference ... is the angles that Zapata can adjust his thrust line to with immediate effect. As in my composite image - he can manipulate the thrust line greatly, not to mention of course the vectored side thrusters. Can your operator achieve this? I think not. Not even close. Can you attach an image showing the maximum thrust line adjustment that you can achieve. Zapata essentially has a fully flexible thrust mounting - because they are on legs. Yours is close to a semic rigid mount and you have pendulum stability to overcome.
@Flapping Flight Well I certainly don't get excited to go ride in an elevator :) I take the stairs because they're more fun.
GoFly does state that they want flight for everyone, but their choice of winners says only for daredevils.
According to Rossy, you can feel the air just fine with clothes on. Granted he does fly very fast, but even sticking your hand out of a car at 35mph you can feel the momentum of the air quite well.
I can't say for sure whether Manolis' device will be easy to control, but I do think it's worth building to find out. I agree with ExpAir that it's a totally different dynamic than Zapata's board, but due to the pilot being in the high speed airstream, you have a kind of aerodynamic control that Zapata doesn't have. So you have a combination of aerodynamic, weight shift, and vectoring going on. Might be totally intuitive, or might be disorienting and prone to oscillation.
You write: “The motorcyclists are probably less than 1% of all traffic participants”
No.
Statistics from China: 2013: 23 million motorcycles were produced (40% of them exported) 2014: 23 million cars were produced (which represents the 26% of the 88 million global car production in 2014).
Even if no other country produces motorcycles, the above numbers say that for each 5 motor-vehicles (cars and motorcycles) produced globally, the one (i.e. 20%) is a motorcycle. The actual percentage seems about 30% (because millions of motorcycles are produced outside China).
In countries like China and India, the number of motorcycles on the roads is comparable to number of cars.
HIGH SPEED
You write: “Also 100 mph is too high speed to be exposed on it for too long ! Where are this speed limits ( I want to go there :))? Only in Germany on some interstates doesn't have speed limits!”
For a specific destination, say 150 miles away, and flying at 150 mph (240Km/h) instead at 50 mph (80Km/h), the duration of flight reduces to 1 hour from 3 hours.
At 150mph the fuel consumption reduces (50mph is closer to hovering, and hovering is the worst thing for the mileage). As Dusan wrote: “To fight gravity all the time, is the wrong thing to do”).
Rossy flies at such speeds (150mph) for fun, for joy. The worst moment of the flight is when his fuel ends and he has to use his parachute. For less than 10 minutes of flight duration, he suffers a lot (among others he cannot help using a helicopter to lift him a few thousands feet). If he could extend the flight duration from 10 minutes to a couple of hours, and if he could avoid the helicopter and the risky parachute-landing, he would be the happiest man. So, do believe what Rossy says expressing his flight experience and don’t suppose that flying at 150mph is a punishment for the pilot; the contrary: it is a blessing (to fly like an angel). He was a pilot in a cockpit, and now he is a rider in the open air. So, we have better to believe him.
The same is true for the skydivers of the video in a previous post. When the speed exceed 150 – 200 mph the fun starts.
The same for “in house” flying / “dancing in the air”; see the attached video https://www.youtube.com/watch?v=-Aw-qjG2zEI from 2:25 and after. The speed of air is high. Look at the young dancer the moment she exits.
HIGH SPEED and SAFETY
At 150mph speed, besides the flight duration, the need for refuelling / recharging reduces. The most dangerous part of the flight is the take-off and the landing (i.e. when the pilot flies near the ground). The “safe speed limit” on a road or a highway has nothing to do with the safe speed limit on the sky.
SIZE
You write: “The size of the device ( exept for the GoFly competition ) doesn't matter”
It matters a lot. If you have two similar vehicles, the one 50% scale-down of the other, the big one needs four times the power of the other and four times the fuel of the other for the same weight and speed and range. If the weight increases with the size, things get even worse (think: if you need four times more power, you need a bigger / heavier engine and more fuel). So the size does matter, and the weight matters even more.
The Personal Flying Device must as small as possible, as lightweight as possible and as streamlined as possible.
When the pilot of the Portable Flyer is “lying” (supine) almost horizontal on the air, his frontal area is more than three times smaller than when he is standing, and his drag coefficient is more than three times better than when he is standing. In total the aerodynamic drag force drops more than 10 times relative to when he would fly standing. Imagine a Harley Davidson rider travelling at 100mph on a Germany Highway; he is almost standing in the air, which means he needs some 10 times the force (and the power and the fuel) he would need if he was cruising horizontally, at the same speed, with the PORTABLE FLYER).
So, the size and the weight are the most important components when a useful transportation means that will fly in the air is to be designed.
You also write: “Isn't the GoFly vision was the device to be usable for everybody ?”
Here is another GoFly vision: “GoFly is about flying people, not flying taxis.“
And another GoFLy vision: “the device should be user-friendly--almost an extension of the user’s body, and provide the thrill of flight.”
Don’t take them too seriously. They have various incompatible visions. Even the 20miles range is a vision for them! Their credibility is questionable, at least (does anybody know his scoring, or ranking, or the judges justification for his submission? It is more than two months from the Phase I Awards Issue).
You also write: “the people aren't birds”
Quote from the submission: “the human brain and the human senses / body are adequate (just like the brain, body and senses of the birds, bugs and bats) for safe controlled flights. The problem is that the human body is not adequately strong to provide the required power for the flight. What a human needs in order to fly is plenty of power provided, if possible, in a completely neutral way. This is what the PORTABLE FLYER is: it is like an extension of the human body and it is providing the required power in a true neutral way. The brain, the senses and the muscles do the rest”
End of Quote
As compared to the birds, the only we lack in order to fly is the power.
Do not believe me.
Believe Rossy who:
"flies with the grace of an eagle, and the subtle body movements he uses to maintain flight - and perform his loops, rolls, and other maneuvers - mimics a bird of prey".
With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators. “Arching his body “like a banana” from head to toe allows him to fly horizontally; subtle movements from left to right will change his flying direction.
“I am the fuselage, and the steering controls are my hands, head and legs,” Rossy says.
He knows better than you and me.
You also write:
“Have you been striked in the face or naked parts of the body by relatively larger insects guys , even with speed much lower than 100 mph ? I have ( and the expirience isn't pleasent )but haven't been striked by bird yet and probably that's why still alive .”
This is a minor problem for the motorcyclists and for the passengers of convertible cars. Even when you walk on the ground, a bird can strike you, or sh** on you. And a bee can sting you. And a dog can bite you. Etc, etc.
Come on.
The real danger when you fly is to fall and strike the ground. All the rest are like jokes. The safety should minimize the possibility of such an event (to strike on the ground). The accidents happen mostly when the flight is in bad weather conditions. And this danger increases a lot for big / underpowered / slow moving Flying Devices. Your passenger is “protected” inside the cockpit, but he is in a big underpowered vehicle which is at the mercy of the winds, a “feather in the wind” when the wind blows strongly.
Quote from the submission:
The ability for high speed flights is mandatory for the safety; at windy weather a big size / slow moving (“hovering”) flying device is a “feather in the wind”. A personal flying device having 30 kts maximum speed and flying along a sea shore, has a big safety risk when the wind starts blowing towards the sea at, say, 35kts.
End of Quote.
When flying in the air, what matters above all is to master the air, to stay in the air and to land safely.
A compact, lightweight, overpowered, high speed Personal Flying Device is far safer than a big, heavy, underpowered, slow (but comfort) one.
If I had to fly in adverse weather conditions (say for a rescue) I would pick the smallest, the lightest, the simplest, the most powerful, the easiest to directly control device.
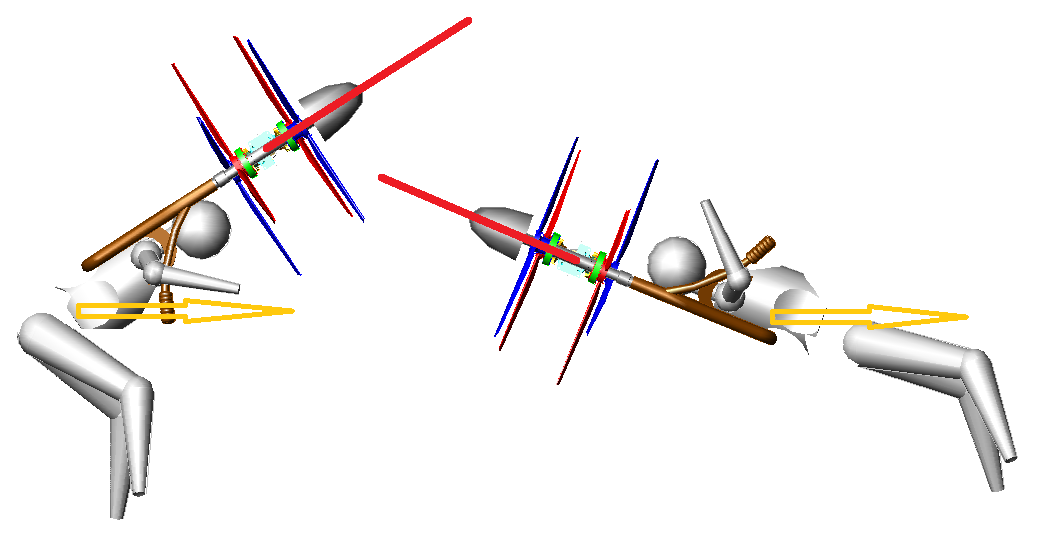
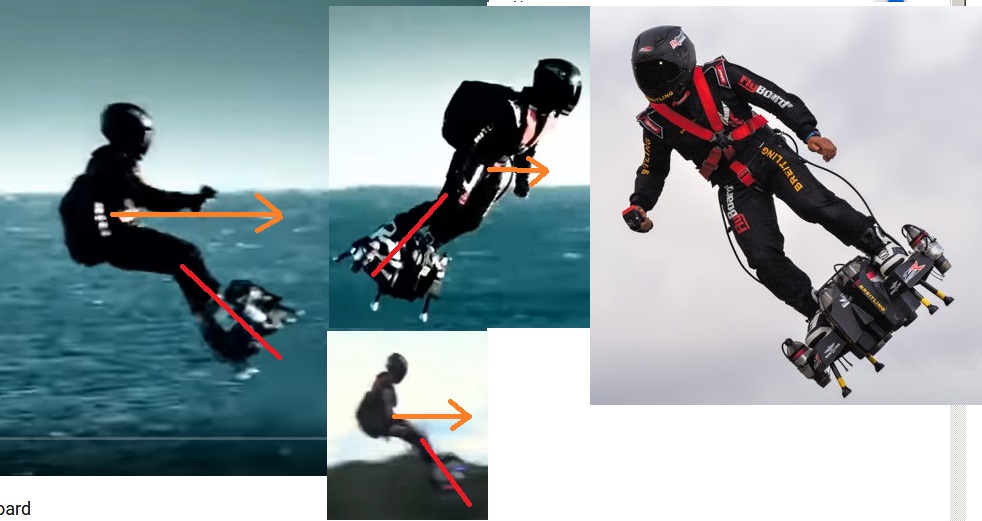
You write: “Manolis - the big difference ... is the angles that Zapata can adjust his thrust line to with immediate effect. As in my composite image - he can manipulate the thrust line greatly, not to mention of course the vectored side thrusters. Can your operator achieve this? I think not. Not even close. Can you attach an image showing the maximum thrust line adjustment that you can achieve. Zapata essentially has a fully flexible thrust mounting - because they are on legs. Yours is close to a semic rigid mount and you have pendulum stability to overcome.”
At left the pilot of the PORTABLE FLYER accelerates.
At right the pilot of the PORTABLE FLYER decelerates strongly.
The colours used are similar with yours.
So the leaning of the thrust force versus the horizontal speed can be as, or bigger than, Zapata’s.
But is is more than this.
As explained in a previous post, the big difference is that at small-medium speeds Zapata’s body is not in a fast moving air, so he cannot use his body (head, arms) as ailerons for the aerodynamic control of his flight, while the body of the pilot of the PORTABLE FLYER, from the take-off to the landing, is permanently inside a high speed air (downwash stream of propellers), which enables him to control his flight by both: by weight-displacement control (as Zapata and GEN-H-4), and by aerodynamic control (as Yves Rossy).
Question: Suppose that somehow Zapata achieves to extend his flight duration to 2 hours; for instance by using an imaginary fuel twelve times more oomph (specific energy content, kWh/Kg). Who of the two will land tired? The legs / feet of Zapata take all the weight of his body and all the weight of the fuel. The other one is “hanged”.
Another question: Suppose that both accelerate upwards at 1g (10m/sec2). The body of the PORTABLE FLYER pilot is tensioned. The feet / legs of Zapata are compressed / loaded with (70+20)*2 = 180Kg (400lb) (70Kg is his weight, 20Kg is the fuel weight).
Manolis - both of those positions are not achievable by your operator and flyer. You can draw the images but I'm telling. Position 1 is not achievable from hovering flight, and position 2 is only achievable as a pendulum reaction - not as a controlled action. If you dont believe me - build a half scale RC model and see for yourself. Not possible !!
You write: “ both of those positions are not achievable by your operator and flyer. You can draw the images but I'm telling. Position 1 is not achievable from hovering flight, and position 2 is only achievable as a pendulum reaction - not as a controlled action. If you dont believe me - build a half scale RC model and see for yourself. Not possible !!”
Quote from the submission
Just like driving a bicycle, the eyes / otoliths / body / brain of the rider / pilot of a PORTABLE FLYER are the sensors and the control system: the rider soon discovers the way to react properly and to keep the control. . . . In a PORTABLE FLYER it is better to be used the body of the pilot as the main sensing and controlling equipment (birds like), than developing and paying and carrying stabilizing and flight management systems. . . . The body, the eyes and the senses of the pilot/rider are available; why not to use them as the fuselage, the sensors and the control system? Isn’t this what the birds are doing?
End of Quote
To scale a human is not possible. As Yves Rossy’s Flying Device, similarly the PORTABLE FLYER is basically its pilot; the engines-propellers are there only to provide the required thrust.
So, the half scale RC model you propose is not useful. Full scale is the way to go.
Did you see the last video (the air-tunnel-dancing) and the way the dancer controls her body pose? All she has to interact with, is the high speed air stream around her, and her body weight.
Similarly, the pilot of the PORTABLE FLYER is inside a high speed air stream all the time, even during the take-off, even during hovering, even during the landing.
Initially the pilot with the PORTABLE FLYER on his shoulders ascends.
Then he stops ascending and hovers.
Then displacing properly his legs / arms in the downstream of the propellers, is pushed by a pair of eccentric aerodynamic forces (i.e. a twisting moment) that cause the rotation (yaw) of the Portable Flyer about its vertical axis towards any direction.
From hovering to cruising:
The pilot bends his waist to displace his legs forwards for, say, some 45 degrees shifting the center of gravity ahead the plane of the propeller axes and deflecting forwards (with his legs and feet as ailerons) a part of the high speed downwash air stream of the propellers. The displacement of the center of gravity combined with the backwards force on the legs / feet of the pilot, turns the PORTABLE FLYER quickly and substantially. I.e. the leaning of the thrust force is caused by the displacement of the center of gravity and by the deflected, by pilot’s legs, air stream.
If something is still confusing, let me know to further explain.
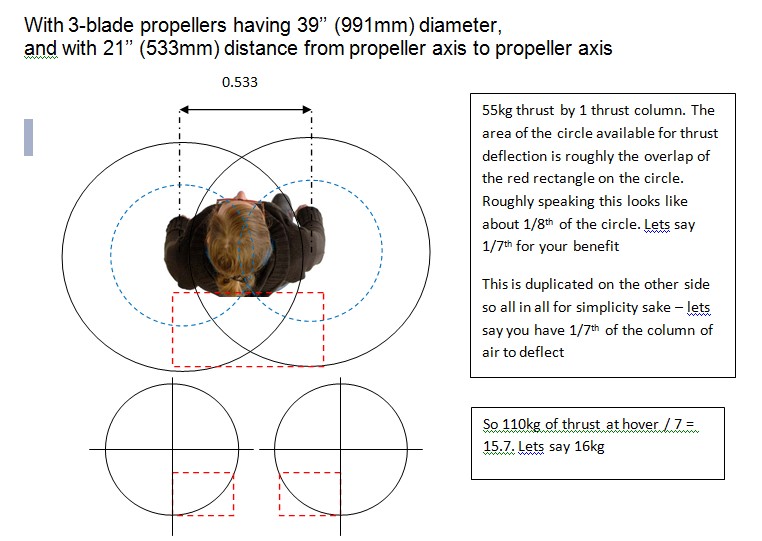
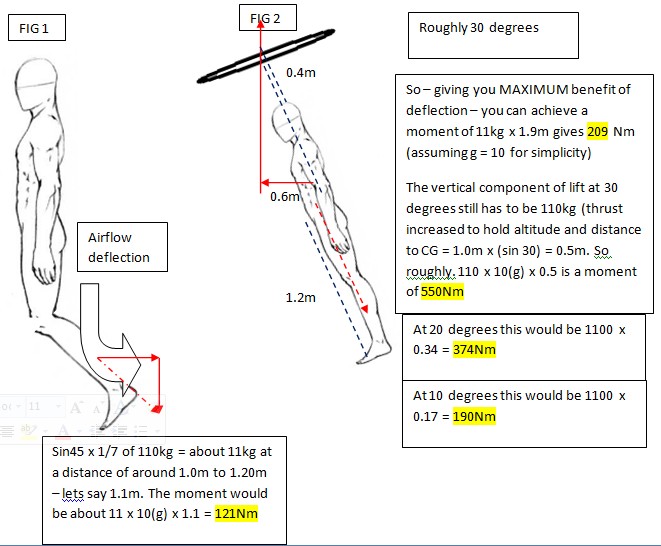
Firstly to get an idea of your deflection capability using legs. purely on area - i have given you about 1/7th of the force available. The reality is that withut a wingsuit or wing - your legs and feet will barely access a quarter of what i have given you credit for here.
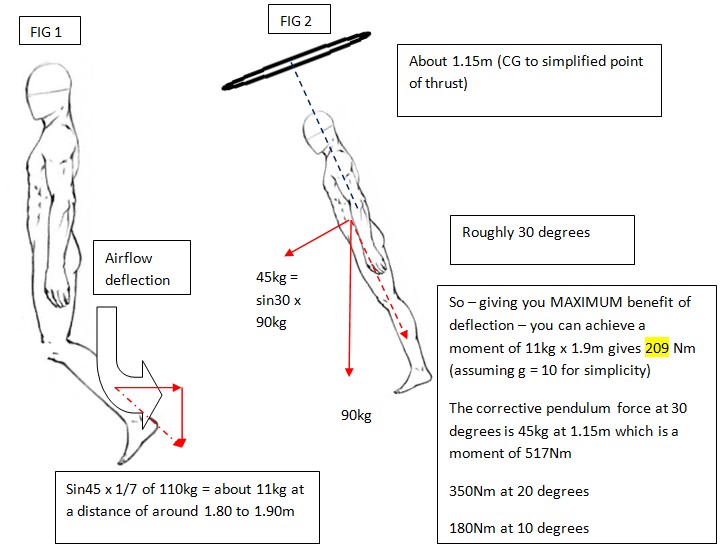
Allowing for deflective force and a fairly simplified set of calculations - I can show that from hover - using leg and feet deflection you will barely get 10 to 15 degrees tilt from the vertical. For simplicity sake I have used a value of 1.9m being the moment arm from thrust point to centre of leg and foot deflection. I have used a value of about 1.15m for moment arm from thrust point to CG I am not sure if you will follow the maths - but I'm sure you will get the picture, so to speak
The reality is probably more in line with 10 degrees tilt that you will achieve - and this is ok - it allows you to gain forward speed. However - you would have to gain substantial forward speed to produce enough drag to to start forcing the body up to a higher angle.
Predominantly you will be like the Gen H-4. Your pendulum effect gives you good hover stability but works against you in achieveing other orientations. Without using a wing - other orientations will hardly benefit you anyway. I certainly recommend a wing and a foot/lower leg mounted board to act as elevator
as you stated - the best performance analytics will be obtained by building a full scale. Is this something you can achieve? Do you have sponsors or a company to work with you. Would be good if you could get a demonstrator going.
By the way - I highly recommend the rotors being out of hands reach - all I keep seeing is a lot of potential shredding.
Thank you for your time to think and prepare your last two strictly technical posts (analysis and drawings).
There is a mistake: the “thrust point” (i.e. the pivot about which the “pendulum” swings) is not where you locate it.
While in the GEN-H-4 the pivot is high, above the head of the pilot, in the PORTABLE FLYER the pivot is below the shoulders of the pilot; say, in the “center” of the saddle.
So, the thrust force turns not about the center of the propellers, but about the “center” of the saddle (the engines with the propellers are secured on the saddle).
In case the above are not yet clear: suppose that the side holed pipes, at the top of which the propellers are rotatably mounted, are way longer (say 10m). These pipes are secured on the saddle, which is fastened on the shoulders / torso of the pilot. Forget for a second the mass and the center of gravity of the engines, and concentrate on the thrust force from the propellers: for the saddle and the pilot, either the centers of the propellers are located 0.5m above pilots head, or 10m above pilots head, it is the same: the saddle “feels” only a force along the direction of the side pipes of the frame.
You have to spend the required time to repeat your calculations, this time with the correct “pivot”. Instead of using 1.15m for the moment arm (according yours: “I have used a value of about 1.15m for moment arm from thrust point to CG”), you have to use the correct “moment arm”, which is several times (say 4?) shorter.
You also write: “By the way - I highly recommend the rotors being out of hands reach - all I keep seeing is a lot of potential shredding.”
Quote from the submission (http://www.pattakon.com/GoFly/index.html abstract). “The saddle prevents the pilot from lifting his hands above his shoulders, thereby protecting them from the propellers.” End of Quote
Manolis, Im not wrong - the point of thrust is the hub of each of your rotors. The equivalent combined thrust point is between your rotors - so well above the pilots head. This is a fundamental. I wont try and correct you any more. Just go ahead and build it.
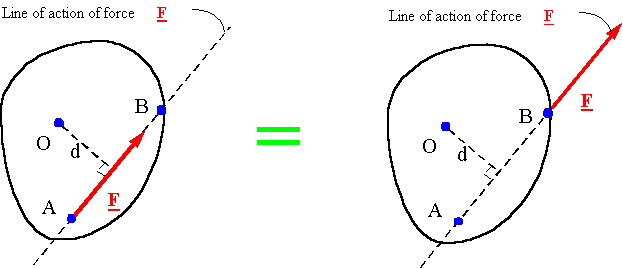
Two force systems are equivalent if they result in the same resultant force and the same resultant moment.
Moving a force along its line of action: Moving a force along its line of action results in a new force system which is equivalent to the original force system.
I would have to agree with Manolis on this. If the propellers do not tilt relative to the rest of the aircraft (body, fuselage etc.), then there is only a 'line' of thrust. There is no 'point' of thrust.
Also, for the same reason, there is no pendulum effect in this design.
I'm no expert, but I think the moment arm is the distance from CG to control surface (legs), not distance to propeller. I'd guesstimate the CG of the entire system (pilot+Portable Flyer) to be around the pilot's neck. So for bending hips forward, your knees will be approximately the center of the control surface, and for me that's about .9m from CG. For bending knees back, center of control surface is middle of shin, more like 1.1m from CG. Which means the control authority is even less than ExpAir's calculations.
HOWEVER, I think ExpAir's analysis is wrong. There is no pivot just below the lifting surface like regular weight shift aircraft. Only bending of the pilot's body. There is no rotational moment due to weight of the pilot as in ExpAir's diagram, because there's nothing preventing the Portable Flyer from falling right along with him, except for the vertical component of the thrust. So the pendulum force is the vertical component of the propeller thrust (cos(pitch)*thrust), and pendulum moment arm is the horizontal component of the propeller-to-CG line (sin(pitch)*DistanceFromPropellerToCG). As the whole system becomes more horizontal, the vertical component of thrust is reduced, so there's less pendulum moment, but it has more leverage so there's more pendulum moment. I think the maximum would be around 45 degrees. So if the control surface is able to overcome that, you should be able to orient yourself any way you like.
So let's say control surface is .9m from CG, and propeller is .7m from CG, thrust is 110kg, and the whole kaboodle is pitched forward 45 degrees at the moment. From ExpAir's analysis, that means control surface force is 11kg (108N), but now at .9m, so 97Nm torque. Vertical thrust is 110kg*cos45=78kg (763N), and moment arm is .7m*sin45=.5m, so pendulum moment is 381Nm. So ExpAir is correct that aerodynamic control will not overcome pendulum stability.
But that's still not a complete analysis. There is a weight shift component as well, because when the pilot's body is bent forward, the CG is shifted forward of the thrust line. Then you get the whole thrust multiplied by that small distance, helping to tilt you forward as well. If you can get the CG 10cm forward, that's 107Nm of additional torque. But you're still 176Nm short of what's needed to hold that 45 degree orientation.
On the bright side, that means you can't accidentally flip yourself into a nose dive while trying to hover. But also means that you'll need a lot of forward speed before you have any chance of reaching horizontal orientation. Wingsuit will help.
aaah - yes. I was wrong. I will adjust my diagram and repost. but... I will cover both having a footboard to aid side displacement and not. So yes the pivot IS in fact the CG, not thrust point or the shoulder point.
Oh, I think I forgot something important. The horizontal component of the thrust also exerts a torque, with moment arm being the vertical component of the propeller-to-CG line... and that torque cancels out the pendulum torque I described before. Meaning there's no pendulum torque at all, and you can flip yourself into a nose dive just fine. I think this is the pendulum rocket fallacy.
OK - I have revised my calculations. Thanks for the corrections (despite initial stubbornness) Unfortunately - as you will see - this hardly leaves Manolis in a better situation - in fact very similar to worse off. Firstly I have surmised that you wouldnt want the lower rotors closer than 30cm from the top of your head - so I have made the CG of the motor and prop assembly at a distance 40cm above the operators head. Although reality may differ slightly - you will see that this doesnt really change things much. So using a 1.8m tall man - plus the 40cm above him for the motors CG - I have come to a combines CG at 1.2m from floor and distance from CG to the the motor CG about 1m. This will also be regarded as the thrust point which is still relevant.
If the operator wears a large board on the legs he could achieve the 121Nm of torque - but with legs alone I think the value will be a quarter of that - because the total effective area of round lower legs in the airflow really is about a quearter of my projected 1/7 area of thrust that could be harnessed - so that would drop it to 30Nm. Totally ineffective and the craft would gain slightly more than nothing from leg deflection.
With a board the operator still doesnt come close to balancing the corrective moment at even 10 degrees.
If we assume that somehow the operator reached a 30 degree angle as in my fig 2 - the corrective force is so great that the only way this would be maintained would be with amazingly great forward speed to produce a lot of drag.
So - yes of course this is all simplified. The operator can adjust the thrust vector slightly with the handles - but I think the point we were trying to show here is well proven. From Hover - attempting to move forward and gain any angle greater than 10 to 15 degrees on the operator - not going to happen. With a wingsuit this improves - but Manolis argued that no wingsuit required. My calculations show that even with a board on the lower legs allowing good air deflection to achieve some good side force doesnt get you 10 degrees, or more accurately the corrective moment at 10 degrees is far greater than the deflective moment at hover.
You might achieve something interesting if you gained some altitude - did a bit of a tail slide - using a wingsuit of course - let the nose drop - plummet at 150mph and give full power and enjoy the flight. That test pilot will have my respect.
Let me know if I have something wrong in the calculations - but I think its ok this time
You write: “Also, for the same reason, there is no pendulum effect in this design.”
In the PORTABLE FLYER design there is, among others, “pendulum effect”, with the pivot (or gimbal joint) being near the middle of the thoracic spine (the “line of thrust” can swing about said pivot, or equivalently, the lower body of the pilot can swing about said pivot).
The pilot can control his PORTABLE FLYER in various different ways, one of which is the way the pilot of the GEN-H-4 controls his Personal Flying Device.
You write: “Let me know if I have something wrong in the calculations - but I think its ok this time”
Your new calculations are wrong.
You keep on using a “thrust point” (a point at the height of the engines), then you calculate a moment of 550Nm etc, etc, etc. Start thinking with the “line of thrust”. With the Center of Gravity (CG) on the “line of thrust” the moment is zero / null.