August 2, 2018
Yesterday GoFly / Herox deleted the Forum wherein the contestants of the GoFly / BOEING contest presented their opinions and their complaints.
The following posts to the Forum, cover the period from June 15, 2018 to August 1, 2018 when the Forum was deleted.
It would be a pity these posts to be lost (the first ones having to do with the common sense and reasoning, the later ones being strictly technical).
It was an effort to wake-up the contestants, and to show to BOEING how much the contest of GoFly / BOEING has degraded.
The reader can judge by himself.
Hello all. (15 June 2018)
As most of you,
when I first saw the “BOEING” as the big sponsor
of the GoFly contest, I thought the contest would be at least
transparent.
I thought that BOEING would not allow the
“BOEING” name to get involved in anything not transparent or in anything
opposite to the common sense and reasoning.
Now, after the official announcement of the
phase I prizes of GoFly / BOEING:
I still do not know how many ideas were
submitted (the 600+ innovators and the 6(!) continents say nothing about the
number of “solutions” submitted). Does anybody know why this number is still a
top secret? Any guess?
I still do not know who the judges are and what
criteria and points they used.
I still do not know the solutions of the 10
winners. The low resolution graphics provided, are not explanatory in most
cases. GoFly should publish the high resolution graphics of the winners,
something that complies with their own (GoFLy’s) rules.
Quote from the submission:
In section 1 it starts with: “1. Information for
GoFly publications. No data submitted in this section will be used to assess
entries for prizes. Data submitted in this section may be used by GoFly in
various publications such as team lists, AWARD ANNOUNCEMENTS, etc. By
submitting data in this section, you are GRANTING GoFly rights to publish the
data in this section.”
End of Quote.
So, what is all this secrecy for?
The winners would like to see their high
resolution graphics in the web. And by submitting their proposals, they gave
their permission to GoFly for this.
Why all this secrecy, instead of transparency
and publicity?
I still do not know neither the points given to
my submission, nor my ranking (11th? 111th? last?), nor the weak points of my
proposal in order to correct them before proceeding with the next phases.
What I do know now is that I paid US250$ for
nothing. Yet, I had the excuse that behind GoFly was BOEING, and that BOEING
would never compromise with non-transparent procedures. I proved wrong. The
procedures are not transparent, yet BOEING continues to appear as the big
sponsor of the GoFly’s contest.
What I do know now is also that I will not
continue (unless the BOEING will put aside the GoFly, and take over, cancelling
the equity and the rest nonsense of GoFly).
My submission (the technical report, the high
resolution graphics etc) is available at the www.pattakon.com web
site (at the GoFly BOEING section, at the menu at left. Or directly at http://www.pattakon.com/GoFly ). It
was also published in the HomeBuiltAirplaneForum at http://www.homebuiltairplanes.com/forums/showthread.php?t=29167&page=18 two
months ago.
If you want to present your own submission, too,
I have available space in the above www.pattakon.com web site.
How?
E-mail me ( at man@pattakon.com ) your
“Technical Design Report” PDF file as filed to the GoFly contest, your
high-resolution Design Graphics, your two PDF drawings, a short abstract and
your contact details. If after seeing your submission published you don’t like
it, you will ask me and I will delete it from the www.pattakon.com web site.
(or present your submission in the
“HomeBuiltAirplaneForum”, or in another technical forum)
After publishing several proposals /
submissions, we can start a technical discussion in a forum (for instance,
hopefully the HomeBuiltAirplaneForum would like to host such a technical
discussion). This way, the one contestant can have the criticism / objections
of the other contestants, and of the other members of the technical forum. A
third party is always useful.
By showcasing the work / solutions proposed by
several contestants,
it may attract the interest of a rich guy (say
like the Bill Gates of Microsoft, who wrote in “The Time” magazine the
article about the Wright brothers, and who, after spending 23 million dollars
on the EcoMotors OPOC engine, is now trying to forget that he was caught such a
sucker),
or it may attract the interest of a big company
(say like the AirBus) to make a TRANSPARENT international contest
wherein the noise will not cover 50% of the points, and wherein the safety, and
the range, and the speed, and the ownership cost, and the running cost, and the
emissions emitted would take the big part of the points (and not zero as in the
GoFly contest).
So, you have a way to present your work and to
explain it to the public. For free. Your choice.
Is there anything positive / useful in hiding
something that GoFly guys already saw? (and thereby cannot be patented in the
USPTO). If, on the other hand, it is already patented, or patent pending, there
is nothing to hide.
To those who agree that it is not useful all
this work in the submissions (which may prove (in hindsight) to be the
“state-of-the-art” today) to remain hidden and be eventually lost / unknown to
the public. . .
Thanks
Manolis Pattakos
Hello Flapping Flight (17 June 2018)
You write:
“Well said Manolis!
And very good sudgestions .
Also this way anyone for himself will be able to see and compare "winners" to "losers" and to judge how honest was this competition .”
Everybody claims that their submission is the BEST.
GOOD.
For as long as it is secret / hidden, it is the best of the best.
The problem begins as soon as it becomes known to the public.
My submission is published at http://www.pattakon.com/GoFly
For three months now, I am trying to find one more submission to compare with mine.
Why?
Because as the wisest man said, “everything has to be looked at relative to everything else”.
Is there, somewhere, a published submission that I miss?
One is enough.
What are you afraid of?
Aren’t you losers like me?
Thanks
Manolis Pattakos
Hello all. (17 June 2018)
I think you are dreaming.
You want GoFly / BOEING to:
- release scoring for all participants
- post panel of Judges and their qualifications
- publish exact scoring criteria
- publish estimated performance of winning designs; some seem to not fit even
the size requirement, etc
while GoFly / BOEING have not made known even the number of submissions (and I bet US250$, they are not going to).
I read in a post of Birdman:
“they expect us to follow the rules to the letter,
but they dont follow their own rules,”
Three months ago, when I wrote that GoFly / BOEING were brutally violating their central rule of this contest (they turned the competition from the original 20 miles range requirement to a 20 minutes duration requirement), Birdman wrote:
“@man pat”
Dont you have better things to do? How many times they have to tell you its 20 minutes with 10 minute reserve. They write the rules, if you dont like it then dont participate.”
and nobody of the contestants disagreed with Birdman (in the hindsight it seems that while the “20 minutes duration” was attainable for most teams, the 20 miles range was too long to achieve, so the violation of their first rule by GoFly / BOEING was welcome / convenient).
GoFly / BOEING were (and still are) brutally violating their central rule.
Quote, today, from GoFly Guidelines at https://www.herox.com/GoFly/guidelines :
“RULES
The goal of the GoFly Prize is to foster the development of safe, quiet, ultra-compact, near-VTOL personal flying devices capable of flying twenty miles while carrying a single person.”
My suggestion is to stop mourning and grieving and do something.
As I write in the “20 minutes or 20 miles” thread at https://www.herox.com/GoFly/forum/thread/2715?page=3 , everybody claims his own submission is the best, but nobody is willing to open his cards and present his submission (COMPLETE as filed).
Showcase your submissions. It is a good first step.
This way the public will have something to judge the judges of the GoFly / BOEING contest.
If you have a better proposal (apart from complaining) I am all in.
Thanks
Manolis Pattakos
Hello Mokren. (17 June 2018)
You write:
“The Rules are engraved in the marble, they must respect them”
It seems that because the first Rule:
“RULES
The goal of the GoFly Prize is to foster the development of safe, quiet,
ultra-compact, near-VTOL personal flying devices capable of flying twenty miles
while carrying a single person.”
was “engraved in the marble”,
it proved impossible for GoFly / BOEING to correct the “marble plate” to:
“RULES
The goal of the GoFly Prize is to foster the development of safe, quiet,
ultra-compact, near-VTOL personal flying devices capable of flying twenty
MINUTES while carrying a single person.”
It is all about a single word (that makes the difference and separates the winners from the losers).
If they were revising the competition to 15 miles, or even 10 miles, it would be something reasonable.
But the “20 minutes” (TIME) is another thing (at least in physics and in maths).
We go from distance to time.
By the way, what is the purpose of any transport means?
Isn’t it to travel a distance (along a road, or on the sea, or in the air)?
Or it is to remain in the road, or on the sea, or in the air for longer?
What has to do the original “20 miles” with the current “20 minutes”? Can you tell me their relation / equivalence?
(Quote from a post of mine, 3 months ago, at https://www.herox.com/GoFly/forum/thread/2715?page=1 :
According the “20 minutes” rule,
the Concorde that flies 2-3 times faster than
the competition,
should loiter for some hours above its
destination to give time to the competition to arrive…)
PS
It is hard to believe that nobody of the 600+ innovators from the 6 continents (according BOEING) dares to publish his submission.
Thanks
Manolis Pattakos
Hello all. (17 June 2018)
The invitation to publish their submissions at http://www.pattakon.com/GoFly/index.html is for everybody, losers and winners of the GoFly - BOEING Phase I, not only for Flapping Flight.
@Flapping Flight
If you have a submission filed, please e-mail it to me to publish it.
To all:
I am looking to break the NON TRANSPARENCY of BOEING (GoFly) and to force them behave.
And you don’t help, while it is for your own interest, too.
I am looking for more info.
The only official info I have so far, is my own submission published at http://www.pattakon.com/GoFly/index.html
Thanks
Manolis Pattakos
A proposal for BOEING (18 June 2018)
Some months ago a fried from Italy e-mailed me to check in the Internet for BOEING’s Presonal Flying Device contest.
The first words I read in the Internet for the contest were:
“Design and build a safe, quiet, ultra-compact, near-VTOL personal flying device capable of flying 20 miles while carrying a single person.”
Great news.
Pattakon had already designed a Personal Flying Device (we named it “Portable Flyer” a dozen years ago) with better characteristics than the ones BOEING / GoFly were looking for.
Today, I still read the same “call” at the top of all pages of the Sponsored by BOEING “Herox / GoFly” web site:
“Design and build a safe, quiet, ultra-compact, near-VTOL personal flying device capable of flying 20 miles while carrying a single person.”
“The Devil is in the details”, they say.
And the details proved far away from the above central rule / “call” of BOEING.
In order to participate, I had first to accept / sign several “agreements” and to pay a US250$ fee (i.e. about as much as it costs a complete UK-patent, from filing the application, to granting the patent, to the first maintenance fee some four years later).
Despite BOEING / GoFly continue to write at the top of all web pages (see also BOEING’s spot in the CNN) about the 20 miles threshold for the range, BOEING / GoFly did not mean 20 miles but only 20 minutes. The 20 miles range was just a VISION of BOEING / GoFly, not an attainable goal.
Disappointedly, nobody in BOEING involved in the contest understood the huge difference of a contest for 20 miles range and a contest for 20 minutes duration. Trying to awake them up, in this forum and by commenting in BOEING’s youtube videos for the GoFly contest, I felt like trying to explain to a cow about geometry.
Etc, etc.
Back to the Portable Flyer.
It is a pair of extremely compact / lightweight reciprocating Opposed Piston engines, each driving (independently, for safety) its own pair of counter-rotating propellers.
We have already built such engines (“proof of concept” prototypes). Functional. You can see several videos of them running on fossil fuels (regular gasoline, Diesel etc).
All we have to do is to built, in good quality, a pair of such engines, put four propellers and test the Portable Flyer on air.
The design was complete years before your contest, before your webinar, before your mentors, before your “benefits”, before your “equity agreement” etc.
However, in order to participate in the next phases of BOEING’s contest, I am asked to pay again (this time for insurance etc), I am asked to make a company, I am asked to allow equity from my Intellectual Property to GoFly / BOEING and, who knows, what else (the recipe is simple; to get an “invitation” for the third phase (Fly-Off) I will have first to sign some more “papers / agreements” with BOEING GoFly, and offer what rights they will ask for, otherwise no invitation).
BOEING, come on.
BOEING is better that this mesh (unless it is success when 90% of the contestants are threatening to sue BOEING for non transparency).
BOEING, put some common sense and reasoning on your thinking about this really simple, and straightforward, contest: it is just about designing and building and demonstrating a Personal Flying Device that can carry a single person safely and quietly 20 miles away.
BOEING do behave as the ordinary people expect from the BOEING: Put aside the GoFly (they failed; don’t you see it?), cancel the nonsense GoFly requires for the next steps and take over the contest. BOEING refund the fees (250 or 500 USD) the contestants paid so far, pay for the insurance of all contestants (if it is really required for the phase II; but let me doubt a lot about it). Forget the equity nonsense. Multiply the prizes (from 2 millions to, say, 10 millions) and make everything TRANSPARENT, open to the public and worthy of BOEING’s name and reputation.
This way both, the BOEING,and the world, will gain from this contest. As it is now, this contest is a mesh.
BOEING, it is your choice.
You can allow me continue in your contest, or you can disqualify me as not obeying to the unreasonable requirements of BOEING / GoFly.
Either way,, the Portable Flyer will be manufactured and be demonstrated in the YouTube to prove that it can pass all the thresholds set (plus a useful 200+ miles range on good mileage).
By the way, the Portable Flyer has a maximum dimension of 5ft, 3inch (~1.6m). It is so lightweight that the only landing gear is the legs / feet of the pilot. And as far as I know, from the submissions I saw so far, it is the – by far – most lightweight.
In the 10 winners of Phase 1 there are some having, beyond reasonable doubt, 8.5+ ft maximum dimension. Say they cut what is outside the 8.5ft sphere and reduce the maximum dimension to “only” 8.5ft, which means zero points from the dimension, which means 40% of the points lost (I know it is a stupid scoring to give 40% to the maximum dimension and zero points to the range and to the cost and to the take-off weight etc, but this rule is not mine, it is BOEING’s / GoFly’s).
If I was allowed, I would ask the judges: how on earth a Personal Flying Device that sacrifices 40% of the scoring for its BIG size can be the winner of this contest?
For the reader who doubts about the previous and the dates given, please check the following links (the last is from 2006).
Autosport Technical Forum, March 2016:
F1 Technical Forum, March 2016:
https://www.f1technical.net/forum/viewtopic.php?f=4&t=10966&hilit=Portable&start=795
HomeBuiltAirplanes Forum, March 2016:
http://www.homebuiltairplanes.com/forums/showthread.php?t=24606&page=4
The original idea of the above design (but with one only engine and two only counter-rotating “wide-Vee” intermeshing propellers) is 12+ year old.
Check out at https://forums.autosport.com/topic/91863-can-a-diesel-rev-efficiently-at-6000-rpm/page-2 (at AutoSport Technical Forum, published on December 2006, i.e. 12 years ago).
At http://www.pattakon.com/opre1_files/pattakonOPRE.pps is the presentation filed for the OPEN TECHNOLOGY FORUM of the International Engine Expo, May 2008, Stuttgart, Germany; look at the last-but-one page, the animation).
Thanks
Manolis Pattakos
Hello Flapping Flight (19 June 2018)
You write:
“If there is really 20 miles -20minutes problem this speak by itself about rules.”
Thanks.
Press release in Telegraph UK, Febr 1, 2018 at https://www.telegraph.co.uk/business/boeing-uk/jetpack-hoverboard-travel-reality/ :
“GoFly, sponsored by Boeing, is challenging the
world’s brightest inventors, designers and engineers to design and build a
personal flying device.
It MUST BE capable of near-vertical take-off and landing, and ABLE TO CARRY AN INDIVIDUAL FOR 20 MILES WITHOUT REFUELLING OR RECHARGING.”
For the average visitor of the Herox / GoFly / BOEING web site (i.e. the visitor who is not interesting, or capable, to deal with the details), the above press release is still the case (unless I am the only one that reads at the top-right of all web pages of Herox GoFly: “Design and build a safe, quiet, ultra-compact, near-VTOL personal flying device capable of flying 20 miles while carrying a single person”, while at the top-left it writes : “SPONSORED By BOEING”).
Yet this is false / misleading / deceiving information for the public.
And if everything ends up according the current rules / procedures / schedule of the GoFly contest, and a winner Personal Flying Device is eventually nominated (1 million USD prize), the possibility the winner to “NOT be able to carry an individual for 20 miles without refuelling or recharge” is almost a certainty (the points for the low noise cover 50% of the total scoring, the maximum speed counts for only 10%, the total take-off weight covers 0% of the scoring, the range covers 0% of the scoring, the energy or the fuel consumed covers 0% of the scoring).
This is why I say that BOEING got trapped (they can’t claim they don’t understand the difference between the distance (miles) and the time (minutes)). And now, together with the GoFly that they sponsor, are misleading the public.
To BOEING:
It is simple to get out of the trap:
Take over the contest and correct it.
Cancel the nonsense required from the contestants in order to proceed with the next phases.
Refund the fees the contestants paid so far (it is no more than 50,000USD in total).
Multiply the prizes (10 millions fit better to BOEING’s fame; “A copper coin would suit the beggar’s need, but gold coins suit Alexander’s giving”).
And make everything TRANSPARENT, and open to the public, and worthy of BOEING’s name and reputation.
Thanks
Manolis Pattakos
Hello. (19 June 2018)
On February 1, 2018,
at https://www.telegraph.co.uk/business/boeing-uk/jetpack-hoverboard-travel-reality/
under the title: "Build a flying machine and help transform the commute",
your journalist Kevin Coyd writes for the BOEING / GoFly International Contest for Personal Flying Devices:
"GoFly, sponsored by Boeing, is challenging the world’s brightest inventors, designers and engineers to design and build a personal flying device. It must be capable of near-vertical take-off and landing, and able to carry an individual for 20 miles without refuelling or recharging."
Things have changed.
Instead of flying for 20 miles, now the contest is about flying for 20 minutes.
At first glance it appears as a small change, however the difference it brings is huge.
The big winner (1 million USD prize) of the contest needs not to be able to carry an individual for 20 miles without refuelling or recharging. The most possible is the big winner to be able to fly for just 7 miles.
BOEING / GoFly, by “lowering the bar” of the range, favour some teams (especially those with batteries) in expense of some others.
The strange thing is that at the GoFly web site (at https://www.herox.com/GoFly/guidelines ), the original goal appears unchanged: Design and build a safe, quiet, ultra-compact, near-VTOL personal flying device capable of flying 20 miles while carrying a single person.
Also, as you can check, several contestants are complaining for lack of transparency and are threatening to sue BOEING / GoFly for it.
And it is not only the miles - minutes and the transparency of the contest. There are more.
Instead of being a contest about designing and testing useful transportation means for the future, it degraded to paper work, to
Please take a look at https://www.herox.com/GoFly/forum/thread/3087 and https://www.herox.com/GoFly/forum/thread/2715
Dig a little.
You may write a good article for your readers.
You can also push BOEING to behave as BOEING.
Don’t hesitate to contact me for anything more details.
Have a nice day
Manolis Pattakos
Hello all. (19 June 2018)
The last posts show, once again, the lack of reasoning and of common sense behind the “20 minutes” requirement.
The contest is not about super-copters that have to hover for long during a rescue, nor for crane helicopters, but for small “single seat” Personal Flying Devices.
A “fast” Personal Flying Device cruising at 120mph (193Km/h) needs only 10 minutes to cover 20 miles. Suppose that at 120mph is where “the fuel consumed per hour of flight” minimizes.
A “slow” Personal Flying Device cruising at 30 kts (35mph, the minimum threshold at the 6 knots (6.9 miles) speed measurement) needs 34 minutes to cover the same 20 miles, i.e. in the 20 minutes of the Fly-Off demonstration it cannot cover more than 11.5 miles (and if the fuel consumed per hour of flight minimizes at 0 mph (hovering) then the “slow” Personal Flying Device can win the contest flying for only 6.9 miles, hovering for 8 minutes, and requiring fuel – or energy - for 1.5* 6.9 = 10.5 miles in total.
The “fast” Personal Flying Device is punished to loiter for 10 minutes.
At loitering it continues to fly at 120mph (because there is where the fuel consumption per hour minimizes).
In the 20 minutes it covers in total 40 miles (and it has to have fuel - or energy in the batteries - for another 10 minutes, i.e. for another 20 miles). In total the “fast” Personal Flying Device has, at take off, to carry fuel (or energy) for 60 miles.
Interesting comparison?
The one needs to carry fuel / energy for 60 miles, and covers a distance of 40 miles during the Fly-Off demonstration.
The other needs to carry fuel / energy for 10.5 miles, and covers a distance of only 6.9 miles during the same Fly-Off demonstration.
The ”slow” one can, reasonably, be the by far winner because it can easily be quieter (and the noise counts for 50% of the scoring).
Can, the GoFly wizards, professors, mentors, judges etc explain the usefulness or meaning or reasoning of loitering?
Thanks
Manolis Pattakos
Hello BOEING. (20 June 2018)
It is a good step forwards that GoFly officially made known the number of submissions.
From the 600+ innovators from the 6 continents, which turned up to mean 164 submissions. . .
It seems that the next step towards TRANSPARENCY is going to be the announcement of the scoring and of the ranking.
You are kindly requested to publish, as soon as possible, my scoring and my ranking. I have nothing to hide (my submission COMPLETE is published at http://www.pattakon.com/GoFly/index.html )
I want my scoring and my ranking because I have paid the required fee.
If there is an additional fee for the scoring / ranking, please let me know.
Thanks
Manolis Pattakos
Hello Drew. (21 June 2018)
I’ve been tiring and boring to repeat about the lack of TRANSPARENCY (and of common sense and of reasoning) in this contest.
I’ve been tired to repeat that GoFly / BOEING broke their FIRST rule:
In all their press releases about the GoFLy / BOEING contest, they refer in general to the rest requirements (safety, quietness, compactness, near-VTOL), but when it comes to range, they SPECIFICALLY require a minimum range of 20 miles.
The only number they give is the 20 miles. Am I wrong?
Most likely, the big winner (1 million USD) will show / prove a less than 10 miles range in the final Fly-Off demonstration.
I asked / invited everybody who filed a submission to open it to the public (independently or with mine which is published at http://www.pattakon.com/GoFly/index.html )
Nobody responded.
Drew, I see you are not willing to continue with Phase II.
If so, you have nothing to lose by publishing your submission.
The public (and maybe some potential investor) can compare your submission with the 10 winners and give you a hand to continue with Phase II or to manufacture it outside the BOEING Go-Fly contest.
By the way, are you sure aren’t the formalities that put you in the losers side?
How can you check it without having your scoring, your ranking and the verdict of the judges?
Haven’t you paid for it?
Thanks
Manolis Pattakos
Hello Graeme. (21June 2018)
You write:
“The engine is a Twin rotor Wankel with an electric
turbocharger which gives it high torque at low rpm and right through the rpm
range.
Engines weighs 30kg; 150hp is intermittent,
120hp continuous.
Fuel consumption approximately 14L/hr”
With 120hp continues power (i.e. 88kW), the mechanical energy provided per hour is 88kWh.
14lt of gasoline (i.e. 10.3Kg of gasoline) per hour, means a BSFC of 117gr/kWh. This is for an engine having 68% BTE (Brake Thermal Efficiency).
There are not such engines. And will never be.
The giant marine Diesels barely pass the 50% BTE (with a peak BSFC of 155gr/kWh), and they are over 2 times more efficient than Mazda’s Wankels.
Check out the fuel consumption. Instead of 14lt/h, it is more likely above 30lt/h.
For all:
When numbers get in the game, the game changes.
This is why I asked EVERYBODY to publish their submissions.
Thanks
Manolis Pattakos
Hello Glenn Martin. (21 June 2018)
What have you to advice Graeme about the fuel consumption of his Flying Device which is quite close to your Martin Jetpack?
How the consumption changed when the new owners of the Martin Jetpack replaced your 2-sroke 2 liter V-4 with Wankel rotaries?
Thanks
Manolis Pattakos
Hello BOEING. (22 June 2018)
The above request of Laser, is also a request from almost all contestants.
The analytical scoring and the ranking are essential information that must be announced with the completion of each phase. Based on this info each contestant can see his proposal weaknesses and compare with others.
BOEING, what is wrong with you?
Secrecy,
delays,
hiding of essential information (like analytical scoring and ranking),
publishing of highly misleading information (the “600+ innovators from 6 continents” turned it out to be 164 submissions),
breaking of basic rules (the 20 miles became 20 minutes),
selection of winners that beyond reasonable doubt do not comply with basic requirements (like the maximum size, the “vision cone”),
etc.
Come on BOEING. You can better.
Thanks
Manolis Pattakos
Hello Milo. (22 June 2018)
100% agree with you.
But where are the other 150 contestants?
Shouldn’t they write here (as Laser, Birdman, Milo and me already did) requiring the analytical scoring and the ranking for the Phase I to be published TODAY (not “soon”, TODAY; unless there never were such things as scoring list / ranking list / the 97 judges etc).
Thanks
Manolis Pattakos
Hello Bill. (26 June 2018)
It seems your design / submission will not be deleted.
So, except:
the 97 judges,
and
the GoFly staff,
and
the BOEING staff,
and
who knows who else . . .
nobody else knows your complete submission, so far.
Don’t you agree that publishing your complete submission in the Internet makes more sense with regard the safety of your Intellectual Property?
My submission, complete, is the only one from the 164 submissions that is open to the public (at http://www.pattakon.com/GoFly/index.html and at http://www.homebuiltairplanes.com/forums/showthread.php?t=29167&page=18 ).
I have space for your submission, too, as well for all the rest 152.
This way the public will be able to compare the losers with the winners.
Thanks
Manolis Pattakos
Hello all. (26 June 2018)
Good point Flapping Flight.
In the announcement for the Phase I prize it is not at all clear when the 10 * 20K USD will be credited to the winners accounts.
To the 10 winners:
Would you be kind enough to inform the 154 losers when the 20,000 USD will actually be given to you?
It is a significant piece of info for those thinking to proceed with the Phase. For both, winners and losers.
Thanks
Manolis Pattakos
Hello all (27 June 2018).
Dusan wrote:
“Not sure anybody will want to publish on a public website their concept because that will limit their patenting rights.”
The correct is that any publication, either on a public or on a private website, limits the patenting rights.
For years now, a basic rule in the USPTO (United States Patent and Trademark Office) is “the first to file”.
The patent will be granted to the first who filed a patent application for it, not to the real inventor who first thought about it; regardless of whether the real inventor is able – with documents, witnesses etc – to prove his claim.
The “first to file” rule simply says that before making known your idea to anybody (either it is the judges of the BOEING GoFly contest, or it is a private website, or a letter to your own brother) you have to file a patent application for it (provisional or utility or . . . ).
The idea behind the “first to file” rule of the USPTO is to stop the countless disputes in the courts about the ownership of any new idea / patent (the worst adventure the Wright brothers got in, was their patent-war with Glenn Curtiss about who invented first the “airplane flight control”).
The USPTO pushes the inventor to start with a patent application and only then to make his idea known to ANYBODY.
Similar things happen in the UK-IPO (United Kingdom Intellectual Property Office): a patent cannot be granted to you if you made it known the filing of an application for a patent.
The 164 submissions are already open / known to the GoFly and BOEING staff, to the 97 judges and who knows to whom else.
If you had not file a patent application in a patent office before submitting it to the GoFly contest, your Intellectual Property rights have already been lost / gone.
I.e. you lose nothing to publish your submission either in a public website, or in a private website or anywhere else you like.
On the contrary, by making it known to the public, you have the benefits of the public criticism and advices.
Thanks
Manolis Pattakos
Hello Mokren. (29 June 2018)
It is interesting that you are looking for a battery pack having a specific energy of only 200Wh/Kg, and nobody yet responded.
In the following quote / comparison, the specific energy content of the battery pack is taken as 500Wh/kg (250% higher than what you are looking for) and the comparison with an internal combustion engine powered Personal Flying Device gives some answers.
Quote from http://www.pattakon.com/GoFly/DTR_1.pdf (page 5, bottom)
Comparison to a battery powered personal flying device
Considering: 50% BTE, 44lb (20Kg) total net weight of the PORTABLE FLYER, 5 US-gallons regular gasoline fuel (31lb, 14Kg) in the tank and a 44MJ/Kg (of regular gasoline) “fuel energy content”,
the total weight (without the pilot) is 75lb (34Kg) at take off, and ~45lb, (~20Kg) at landing,
and the mechanical energy that can be extracted from the fuel is 315MJ. 6
A high-tech modern set of batteries (having, say, an energy density of 500Wh/Kg = 1.8MJ/Kg) capable of providing the above calculated 315MJ of energy, weighs 385lb (175kg) at take off (the same at landing).
Besides the batteries, they are required electric motors for the driving of propellers and a frame to hold everything (batteries, electric motors, pilot, etc).
The EHANG184 (at http://www.ehang.com/ehang184/specs/ ) is an indicative example of such a battery powered personal flying device: 260Kg net weight, 100Kg payload, 100Km/h speed, 25 minutes autonomy and ~25miles (40Km) range.
Starting with the same energy content (315MJ), the total take-off weight (including the pilot) of the electric flyer is 2.5 to 3 times higher than that of the PORTABLE FLYER, which means it requires a few times more power to hover and fly (especially when the maximum dimension is limited and the noise penalty is high), which means a many times smaller range.
The many times smaller range is a crucial disadvantage for the usefulness of the personal flying device and for the safety: even if the path (that the personal flying device is to follow) is full of battery recharging stations, to land and take off several times in order to go to a destination where the PORTABLE FLYER goes “non-stop”, is by itself very risky (the safest part of a flight seems to be the cruising). When there are not recharging stations (like when going to an island) the battery personal flyer is useless
End of Quote.
Question:
Aren’t all the ten winners of the Phase I electric?
Thanks
Manolis Pattakos
Hello all. (29 June 2018)
Quote from: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19870016002.pdf (NASA):
The autorotation constraint pertains to maintaining the mass moment of inertia of the rotor in the rotational plane at an acceptable level.
Autorotation capability is actually a function of design gross weight and rotor aerodynamics as well as the rotor system mass moment of inertia.
End of Quote
The variable pitch is necessary, but not sufficient, for successful emergency landings on auto-rotation.
The Chinook can auto-rotate.
The modern Bell – Boeing V22 (OSPREY), which also has variable pitch propellers / rotors, cannot auto-rotate.
More correctly the OSPREY has an insufficient autorotation capability because its rotors have not adequate moment of inertia relative to its gross weight.
Auto-rotation requires “heavy” propellers / rotors.
Thanks
Manolis Pattakos
Hello all. (2 July 2018)
I have not yet received an “official response” to my simple and reasonable question posted five days ago:
June 27, 2018:
“I do wish for a Submission Reviewer to review my Phase I
submission, and I do wish to receive suggestions for improvement,
but I want it BEFORE becoming a “Phase II Team”.
What is wrong with providing the “suggestions for improvement” BEFORE, instead
of after, being a “Phase II Team”?”
Thanks
Manolis Pattakos
Hello Andrey Semyonov. (july 5 2018)
Franky Zapata has already done it and flies, for two years now, with his VTOL flyboard-air (but it is too loud and has a short range; for the rest, the least you can say is: it is perfect / amazing / spectacular).
Youtube is full of Zapata’s videos.
If you look at the details of the GoFly contest, even the 1 million prize (you talk about) is not true / net / clear:
in order to get to the second phase (there are three phases) you have to create a company and you have to make GoFly (and BOEING?) partner (to give them equity) of your company and of your Intellectual Property (if any).
You can take an idea of where this contest is going to, by looking at the ten winners of the Phase I (even the 10 x 20,000 USD prizes have not yet been paid to the winners of Phase I; ask them if they show any money, yet).
Compare Zapata’s Flyboard-Air with the 10 winners of phase I.
GoFly / BOEING are so serious that they have change the initial 20 miles range requirement to 20 minutes (see the “20 MINUTES OR 20 MILES” thread).
GoFly and BOEING are so serious that they are not going to give the scoring and the ranking of the 164 contestants of the Phase I.
Unfortunately, only one submission, of the 164, has been published so far, at http://www.pattakon.com/GoFly/index.html . The other 163 remain confidential (only the GoFly / BOEING staff and judges know about them).
Let’s hope that eventually BOEING will take over and will make this contest a decent one.
Thanks
Manolis Pattakos
Hello Dusan. (6 July 2018)
You write:
“The most efficient -hovering- aircraft is the single rotor helicopter, but it has low transport efficiency as it cannot fly fast, comparing it to a fixed wing.”
The contra-rotating rotors (Kamov like), the intermeshed-rotors (Flettner / Kaman etc) and the tandem rotors (Chinook etc) helicopters are considered more efficient at hovering than the “single’ rotor helicopters (the lift to power ratio, for similar designs, is better).
The “single rotor” architecture needs a stabilizing, and power-consuming, second rotor / propeller at its back.
The Bell-Boeing V22 OSPREY besides being true VTOL and besides being capable for hovering for hours, it can also flight as an airplane, i.e. at high speeds and at high mileage.
In the typical case, the OSPREY is way more than 95% of the time in airplane mode: it takes only a couple of minutes to vertical take-off and land (VTOL), while it cruises for hours at speeds and at a mileage impossible for the helicopters.
In terms of usefulness the OSPREY architecture is way superior (the helicopters are better only for some special uses).
If you downsize the OSPREY for, say, a dozen of times, then you are close to a personal flying device that is true VTOL and at the same time is capable for high speed cruise on high mileage. If the body of the pilot is the fuselage, if the legs of the pilot are the landing gearing . . . say, like the BRAYFOIL at https://d253pvgap36xx8.cloudfront.net/challenges/submissions/image/badca046431811e8b51f0242ac110002.jpg then the proven technology of the V22 OSPREY (which is in use and in mass production for several years, and for which a long queue of countries is waiting to purchase) . . .
Thanks
Manolis Pattakos
Hello Birdman (6 July 2018)
You write: “Personaly i dont think anyone read my design report”
If what you think is true, then nobody except you will ever read your proposal.
I (and I think several others interested in personal flying devices, VTOL etc) would like to read your submission, if it were available.
Not how good you think your solution is, but the submission itself COMPLETE.
Then I will evaluate how good, or useful, or viable it is.
I would also like to read the submissions of all the rest 162 contestants.
But all the 163 submissions, from the 164 in total, remain strictly confidential so far.
You also write: “So guys stop being cry babies and lets go on.”
Do apply your advice:
Stop being cry baby and do something.
I got sucker like you. I paid 250 USD for nothing, like you.
Let’s do something.
Any idea from the American suckers?
Thanks
Manolis Pattakos
Hello Dusan. (6 July 2018)
For the same disk loading, the single rotor is less efficient.
If you weld the tails of two “single rotor” helicopters to form a tandem helicopter, the total weight is less than double, the power arriving to the rotors is more than double (there is no power loss in the “tail rotors” because there are not tail rotors), the efficiency in hovering is better, the lift capacity is better.
This is, more or less, the idea behind the Chinook (CH-47): it is like made of two single-rotor helicopters welded to form a tandem.
As compared to the Chinook, the V22 OSPREY (which has lower power to weight ratio and more than double disk loading) is a by far better transportation means, by all means.
“The V22 is a compromise.” you write.
The single main rotor helicopter is a compromise, too (it spends energy on the tail rotor, it can’t fly fast enough, it has low mileage, it has small range, it can’t glide or land if the main rotor is damaged, etc)
OSPREY’s specifications (and sales) prove it a successful compromise: true VTOL, much higher cruise speed, much better mileage, by far longer range.
On the other hand it can’t auto-rotate (however it can land gliding, without engines), and it is not fuel efficient at hovering (however the need for hovering is rare; for, say, 99% of its flying time the OSPREY will cruise at high speed on good mileage).
To keep the OSPREY hovering / loitering for long, is meaningless if not stupid.
Talking for hovering and loitering:
At the attached youtube video, Zapata flies at 100 mph; so he needs 12 minutes to cover 20 miles (20 miles is the original requirement of the GoFly / BOEING contest).
The maximum dimension of the FlyBoard-Air of Zapata is less than 2 feet, so he could take a lot of points from small size and high speed.
But even if Zapata could eliminate the noise of his FlyBoard-Air Personal Flying Device, he could never win the GoFly prize because some wise guys in the GoFly / BOEING decided that the requirement is not to cover a distance of 20 miles, but to stay on air for 20 minutes (loitering). And Zapata cannot stay on the air for 20 minutes.
Does anybody understand the meaning / the usefulness of the loitering for a Personal Flying Device?
https://www.youtube.com/watch?v=2_fC2qnwB3A
Thanks
Manolis Pattakos
Hello Mokren. (7 July 2018)
You write:
“For me the Loitering Requirements (to reach the 20min fly)+reserve is a proof of your system efficiency“.
“Efficiency” has a lot of meanings. Which one?
According your reasoning, the Concord should prove its “efficiency” by staying in the air (loitering) for as long as the conventional slow airplanes.
The Concord was designed as a useful fast transportation means; the objective was to carry people from one place to another quickly, not to loiter.
You also write:
“The 20 Miles (used only in the press or as a title (or as a vision)) can be very catastrophic for the challenge”
Catastrophic for the challenge? How?
The number of submissions is not important.
What really matters is whether one (one is enough) good / useful solution of the problem will be proposed.
The rest (find mentors, study webinars, make company, give equity rights, pay insurance, pay fees, pay this, pay that etc) are like a kindergarten play.
“The 20 Miles (used only in the press or as a title (or as a vision))”?
Come on.
It is only 20 Miles (not 200 miles, not 2,000 miles).
What a vision! : a Personal Flying Device having a range of 20 miles!
A vision should be something difficult, something almost impossible.
For the contest, as it is now, the first winner will, most likely, be the one who will better focus on gathering points.
The noise and the size count for 90% of the points.
30kts maximum speed is OK if it reduces the size and the noise at take-off landing.
The required range to show is only 7 miles.
The loitering is the most important!. . .
This is the contest you like?
With a winner that will not be capable to fly to the next battery charging (or fuel) station?
With a winner that will get into lethal danger every time the wind blows over 30kts?
Compare the above with Zapata’s FlyBoard-Air (which is also a Personal Flying Device).
FlyBoard-Air is a reality. It flies for years. See the videos.
The BOEING (GoFly) contest should ask for something better than the state-of-the-art FlyBoard-Air of Zapata (in terms of noise, of mileage and of range, because in the rest, the FlyBoard-Air looks perfect); even if this would reduce the number of submission to less than five.
Thanks
Manolis Pattakos
Hello Dusan. (7 July 2018)
You write:
“Now, if you replace the two rotors with a bigger, single rotor, same disk area, it will have 1.41 less losses, as the loses are proportional to the periphery of the disk, 2 disks have 41% more periphery.
. . .
It does not matter configuration, tandem, coaxial, whatever; if it has more blades, it has more loses. Period.”
And if you make the radius of the single rotor ten times bigger, you will reduce the disk loading by 100, and the losses by far.
But besides hovering / loitering in standstill air, you have also to cruise at high speed / high mileage and to remain stable / controllable at adverse weather conditions.
In the video you can see the winner of the AHS Sikorsky Prize Flight (human powered helicopter, 2013).
https://www.youtube.com/watch?v=syJq10EQkog
Instead of using a larger single rotor, they won the long standing (33 years) contest using four “smaller” rotors.
The hovering efficiency is not the most significant characteristic of a helicopter or of a hybrid “helicopter / airplane”.
The “efficiency” and the “losses” have many definitions.
The “inefficient” OSPREY V22 with its extreme disk loading and its two tilting rotors, proves way better than any helicopter (single rotor or multi-rotor) in terms of range, mileage and cruise speed. And it can land and take-off vertically.
Thanks
Manolis Pattakos
Hello Birdman (7 July 2018)
You write:
“fly board is
impressive,
but look at the details,
very loud,
uses a gallon a minute
usefull range is 12 minutes,100mph
probably cost 100,000$,
I cant see this being anymore then a curiousity.
beyond most people”
So,
the challenge should be:
on one hand to make a Personal Flying Device comparable in performance and controllability with the FlyBoard-Air of Zapata,
and on the other hand, your Personal Flying Device should also be:
quiet,
with much better mileage,
with much longer range,
and with many times lower cost.
To put it differently:
Suppose you win the GoFly contest (I think your design is perfectly balanced / optimised for winning the challenge) and take the million USD.
And when you demonstrate / fly your Personal Flying Device for the TV / press / Internet etc, Zapata comes and flies below you, over you, at your sides, , accelerating, decelerating, stopping, reversing, making all kinds of acrobatics that neither airplanes nor helicopters can do.
The spectators / viewers / readers would laugh. Wouldn’t they?
So the point of reference should be the best of the kind.
And the contest should be about improving the state-of-the-art.
Thanks
Manolis Pattakos
Hello all. (8 July 2018)
My request (made ten days ago and, again, five days ago) for a Submission Reviewer to review my Phase I submission BEFORE BECOMING a "Phase II team" is not yet answered by GoFly / BOEING.
I am still waiting either for the review of my submission, or for the reasoning of GoFly / BOEING according which my request is unreasonable.
In the mean time,
is there a "Phase II Team" that requested and received such a review of their submission?
Thanks
Manolis Pattakos
Hello Mokren. (9 July 2018)
To participate in the rest phases?
Only when BOEING will decide to take over and to turn this challenge to a decent and transparent one.
The credibility GoFly earned so far is for laugh.
They pretend their goal / vision is to foster thinkers and tinkers make people fly.
The 250 USD I paid them is nothing, but make me a sucker: that some guys, hiding behind a big name (BOEING), have deceived me is frustrating.
It is a shame for BOEING to continue as the big sponsor of GoFly.
To put it simply, what I purchased with my 250 USD is the following info:
“You are not in the ten winners of the Phase I. Period.”
Neither scoring, nor ranking, nor justification of the decision, nor a clue for the weak points the judges find in my solution, nothing at all.
Just that I am not in the ten winners of phase I. . .
And now they try to trap again the contestants with cheap “tricks” of the kind:
"Dear contestant, in order to get a REVIEW of your Phase I submission, you have first to register to phase II; and in order to register to phase II, you have, among others, to create a company, to pay insurance fee, to pay “team” fee and to give equity rights to GoFly.”
IMPORTANT:
The trick / the cheating is double.
By “REVIEW” they do not mean the “fully justified resolution / verdict / decision of the judges”.
They just mean “a” review from “some” guy who is nominated as a “mentor”.
As you remember, they promised to give the scoring and ranking, and they never deliver.
Would you characterize the guy who thought the above “double trick” as a “decent guy whose vision is to foster people fly”, or as a scam?
Thanks
Manolis Pattakos
Hello ExpAir and thanks for your pure technical question (the first so far). (10 July 2018)
You write:
“The only problem with your device (if you are wearing a wingsuit) is that with that large contraption ahead of the head, the CG is too far forward for a wingsuit to work in the same way that it does with current gliding wingsuits. So how are you going to allow for the change in CG?”
The above would be the case if the engines were switched off: then the total weight W would be ahead the lift force provided by a conventional wing suit, as shows the drawing http://www.pattakon.com/PatTol/PatTol_axial_pilot3_Weights.gif
But when the engines are running and the propellers are spinning, besides the lift from the wing suit, there is another lift (the force F2) that results from the leaning propulsion unit, as shows the drawing http://www.pattakon.com/PatTol/Pilot_60_deg_Forces.png
This way, the wing suit needs not to deal with the weight W2 of the propulsion unit, but only with the weight W1 of the pilot.
The most interesting is the flexibility of the PORTABLE FLYER “winged craft” (if you can call it so).
It is a living “winged craft”.
For instance, if the pilot feels that the wing suit can take a part of the weight of the propulsion unit, he can (by bending slightly his back or by pulling the handlebars) re-orient the propulsion unit a little more horizontally.
Yves Rossy explains it better:
Quote from http://www.pattakon.com/GoFly/DTR_1.pdf
From page 17:
“The PORTABLE FLYER besides the “weight displacement CONTROL” of the GEN-H-4 (mentioned previously), has also the “aerodynamic CONTROL” of Yves Rossy (Jetman, also mentioned previously).
Quote from: https://www.thenational.ae/uae/jetman-happy-to-call-the-uae-home-1.62201 :
“Arching his body “like a banana” from head to toe allows him to fly horizontally; subtle movements from left to right will change his flying direction.
“I am the fuselage, and the steering controls are my hands, head and legs,” Mr Rossy said.
Similarly, the body of the pilot of the PORTABLE FLYER is the fuselage, and the steering controls are pilot’s hands, head and legs.
The PORTABLE FLYER can be displaced, relative to the body of the pilot, either by the shoulders / torso / back / spine of the pilot, or by pilot’s hands pulling / pushing some handlebars. It is significant, at emergencies etc, the pilot to be able to control the PORTABLE FLYER keeping his hands free.”
And from page 16:
“With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators.
"You feel very well, you feel the pressure," Rossy says, "you just have to wake up these senses. Inside an airplane we delegate that to instruments. So we are not awake with our body."
End of Quote.
Thanks
Manolis Pattakos
Hello ExpAir.
You write:
“I love his (Yves Rossy) flying wing and his whole concept. No question.”
So we have something to start with, a reference point.
Rossy’s delta wing is a fixed wing without ailerons (flaps etc), and has four small jet-turbines secured on it.
The delta wing is secured / fixed on Rossy’s back / torso (alternatively: Rossy is fastened onto the delta wing).
Except the “throttle” control over the jet-turbines, Rossy has no other control over the thrust force and over the delta wing.
In the Youtube video https://www.youtube.com/watch?v=Czy0pXRRZcs of Rossy flying over Dubai, Rossy is dancing in the air.
From 7:52 to 8:02 he is flying “upside-down”, with his arms and legs extended upwards, well above the delta wing. His center of gravity is substantially above the delta wing plain.
In one second (from 8:05 to 8:06) he changes the orientation (the plain) of his delta wing for 90 degrees and decelerates to adjust (8:07) his speed and direction with those of his partner.
From 8:22 to 8:23 they are shown the hands of Rossy controlling his flight. Moving fast in the air (>100mph) the aerodynamic drag and lift are anything but negligible.
From 9:17 to 9:22 he is shown flying “nose up”, from 9:23 to 9:28 he is shown flying “nose down”.
Rossy controls his flight by:
adjusting the thrust force provided by the jet turbines,
and by displacing / rearranging his body relative to the delta wing.
The displacement of his body varies on one hand the position of his center of gravity relative to the delta wing, and on the other hand it varies the aerodynamic forces his head and limbs undergo as they move fast into the air.
How Rossy shifts, into a couple of seconds, from fly “nose down” to fly “nose up”?
All the control means Rossy has over his flight are: his limbs and head (to re-pose them) and the throttle control. Nothing else.
Does the Pilot of the PORTABLE FLYER lacks any of the above control means?
On the contrary, the pilot of the PORTABLE FLYER has a “flexible” (instead of a fixed) wing on his back, and can adjust this flexible wing (either it is a wing / track suit or his mere body) to the specific conditions of the flight.
For instance, above, say, 125 mph the fully extended wing suit offers nothing but resistance; the pilot is better to partially retract his arms / legs to reduce the aerodynamic lift and the drag, and so to achieve higher speeds with the same power. Above 150mph it would be better the pilot to completely retract his arms / legs.
Worth to mention here: the set of the four jet turbines of Rossy is a less neutral power unit than the two engines (each driving two counter-rotating propellers) of the PORTABLE FLYER. In both cases the desirable outcome is a thrust force that can instantly and effortlessly be vectored to the desirable direction.
Quote from the submission:
At the ends of the backbone they are secured two “vertical” pipes whereon the propellers are rotatably mounted.
At the upper end of each pipe, a spinner (inside which is provided space for a parachute) is secured.
The lower ends of the pipes are secured on a “saddle” tighten to the shoulders / torso / back / armpits / suit of the pilot. Through the pipes they pass the fuel, the control (gas cables, parachute trigger cables, signals from sensors, electric power if any, etc), the handling.”
End of Quote
The available gimbal joint formed by the spine between the shoulder and the waist adds zero weight and allows the significant displacement / re-orientation of the propellers rotation axes (i.e. of the thrust force from the propellers) relative to the rest body.
The handlebars are optional.
Relative to the waist, legs and arms, the two shoulders whereon the PORTABLE FLYER is fastened, offer plenty of pitch, of roll and of yaw.
Keep your rest body immovable and try with your shoulder to see how much pitch and roll and yaw is possible (is, each of them, above 50 degrees?).
In order to keep the post short, please let me know where you disagree to focus on it.
Thanks
Manolis Pattakos
Hello ExpAir (11 July 2018)
You write:
“ if the operator is to use a chute - you would have to ensure the rotors dont hit the lines - which seems almost impossible to me”
For as long one at least (of the two) engine is running, there is no reason to open a parachute. Because each engine, alone, driving its two counter-rotating propellers is capable for safe landings. And because each propulsion unit (an engine with its two counter-rotating propellers) is fully independent from the other propulsion unit.
In case both engines fail or stall (say, run out of fuel), the parachutes in the immovable spinners above the propellers can be used for emergency landing.
Through the two holed pipes, the pilot “triggers” the opening of the parachute(s). Even if the propellers continue to spin, it is OK for the parachutes.
You also write:
“Im afraid you dont even have the control to take off - except of course just going max thrust and hoping to arrive at some controllable situation once you have airflow over the wingsuit (Im not serious about that - you would have crashed before that even happens).”
The GEN-H4 looks as the perfect reference point.
From my submission:
The stability and the controllability at vertical take-off, landing and hovering of the PORTABLE FLYER have no reason to be worse than in the GEN-H-4
In the GEN-H-4 the only control is the lever that displaces the center of gravity relative to the rotation axis of the two big (13ft / 4m diameter) contrarotating rotors.
. . .
Quite relevant demonstration is the youtube video at https://www.youtube.com/watch?v=y1CVZ-Ir260 wherein a GEN-H-4 ultralight helicopter having two contra-rotating-fixed-pitch-rotors is perfectly controlled by the pilot pure-mechanically (the pilot displaces the center of gravity relative to the rotation axis of the two rotors).
At hovering some 30ft / 10m above the ground, the stability is excellent; this excellent stability is achieved without any noticeable effort from the pilot: From 1:02 to 1:15 of the video the pilot of the GEN-H-4 looks around calmly, as if he is seating in a chair in the veranda of his 4th floor apartment. He seems so relaxed that if he had a newspaper with him, he would read the news, too. For comparison, in the https://www.youtube.com/watch?v=ey5gPKRWbmU youtube video it is shown the vertical take off and the vertical landing of the high-tech, no budget, OSPREY V22 of Bell Boeing. The variable pitch rotors and the numerous electronic control systems cannot hide the stability issues (from 7’’ to 17’’ (take off) and then from 1’:05’’ to 1’:25’’ (landing)). It reminds a fat cow trying to break-dance..”
End of Quote
I have to copy-paste parts from my submission because it seems you didn’t read it yet.
The PORTABLE FLYER is a symmetrical and compact GEN-H-4 (think of two GEN-H-4 secured to each other, with a synchronization mechanism between their rotors, and you have a big PORTABLE FLYER).
As a symmetrical GEN-H-4, the PORTABLE FLYER can safely VTOL and hover.
As for your other assumption that at take-off full power is required, this is also wrong.
At vertical take-off the engines can operate at half load, with the propellers rotating with tip speed less than half of the sound velocity for the sake of reduced noise.
Your assumption that the pilot needs to take off at full power to gather speed in order to be inside a fast airflow is true for Zapata’s FlyBoard-Air, it is also true for Yves Rossy’s Delta Wing Flying device, but it is wrong for the PORTABLE FLYER.
Quote from my submission:
“The heavy disk loading (thrust to disk area) of the PORTABLE FLYER (similar to that of the OSPREY V22) causes a high downwash velocity, with the pilot inside it.
Either at take off / landing, or at hovering, or at cruising (low / medium / high speeds), pilot’s limbs and head are in a high velocity air stream, which allows the control over the flight in a way similar to the way the skydivers control their flight / fall.
The PORTABLE FLYER besides the “weight displacement CONTROL” of the GEN-H-4 (mentioned previously), has also the “aerodynamic CONTROL” of Yves Rossy”.
Thanks
Manolis Pattakos
Hello Birdman. (11 July 2018)
Your submission appears perfectly balanced for this contest.
I never blamed it.
What I blamed is the contest and its rules that instead of fostering the thinkers and tinker to make people fly, they put obstacles to their creativity, and introduce limitations which will destroy the outcome (like: 50% of the scoring for the noise (!) and 40% for the size (!)).
To make an international contest without first recognising / understanding the state-of-the-art, is stupid and will lead to stupid rules.
And when the reasoning and the common sense and the decency are completely missing (as with the Phase I prizes: no one still knows his scoring and his ranking), then your “Its all pretend and show. How many aircraft out there can fly on pretend? Not many.” suits fine.
When I wrote that the change from 20 miles (which was the original basis of the contest) to 20 minutes was a big mistake, instead of supporting the obvious, you were annoyed, at least.
The state of the art in Personal Flying Devices is:
Zapata FlyBoard-Air
Yves Rossy delta wing
GEN-H-4.
Why?
Because they fly.
And they fly impressively well.
The GEN-H-4 was used only as a reference in order to explain to ExpAir why his claims were wrong.
The GEM-H-4 is quite expensive for what it offers and has several limitations.
The PORTABLE FLYER is far more than a small GEN-H-4.
In my submission I claim that (and justify why) the PORTABLE FLYER combines the advantages of Zapata’s, Rossy’s, GEN-H-4 and OSPREY’s (it can be regarded as a scale-down OSPREY wherein the fuselage is pilot’s body).
Forget my PORTABLE FLYER and compare the FlyBoard-Air of Zapata with the winner of this contest.
The people would laugh on the winner of the GoFly contest if they compare it to Zapata’s Personal Flying Device.
Wouldn’t they?
Thanks
Manolis Pattakos
Hello ExpAir. (12 July 2018)
In this stage of the discussion another “reference point” fits: the skydivers.
Quote from my submission:
“Another quite relevant video that shows how precisely the skydivers can control their fall (flight) is at https://www.youtube.com/watch?v=nSi5HaJw3r4 . The weight of the skydiver is its only propulsion unit; by changing his/her body pose, the skydiver literally dances in the air.”
Do see and enjoy this Award-Winning Skydiving video (from the second 41 and after).
They have neither wings, nor engines.
Each of them has his mere body (to control his flight) and his mere descending weight as the only propulsion unit.
Let’s make a simple calculation:
a 70Kg (155lb) skydiver falling at 160mph (~250Km/h, ~70m/sec) is powered by a power of 700N * 70m/sec = 49kW = 67bhp.
Is the “flight” of these skydivers perfectly controlled?
In order Rossy to show how well he controls his flight, he uses a partner to fly in formation.
Similarly the team of skydivers of the video is also flying in formation (or more correctly: they are dancing in the sky).
Unfortunately, the skydivers can only fall.
But what if they could “fall” at all directions?
Back to the PORTABLE FLYER
What is the difference of a guy wearing a PORTABLE FLYER from a skydiver who can fly not only downwards, but at all directions (downwards, sideward, upwards, horizontally, vertically etc)?.
Instead of using his weight (which is permanently directed downwards) as the propulsion force, the engines / propellers provide a propulsion force that can be vectored at any direction and that can be substantially stronger than pilot’s weight.
At full power take off, the upwards acceleration is above 1g (10m/sec2). This literally means that a guy wearing the PORTABLE FLYER “falls” towards the sky in a rhythm higher than a skydiver falls towards the ground.
So, a wing is not required.
Even the wing suit is optional for the PORTABLE FLYER.
Zapata flies with his FlyBoard-Air without wing because he does not need any wing. His propulsion force well exceeds his weight.
When he accelerates like crazy, his body is leaning a lot, more than 45 degrees in some cases, utilizing the flexibility of his body to work it as a displaceable weight and as an aerodynamic surface (aileron); the same when he wants to brake (braking is another important issue for a flying object and has a lot to do with dynamic safety).
Rossy uses his Delta Wing because he cannot do otherwise. With 90Kg (200lb) maximum thrust force (which is well below his total weight at take-off) he cannot take-off vertically. This is why he needs a helicopter to lift him a few thousands feet. Falling from the helicopter he gathers speed and the delta wing gets into play. Only then he can fly the way he does.
If his thrust force were double, his delta wing would be quite smaller.
If his thrust force were even stronger, he would need not a wing, at all.
So, the wing covers the lack of thrust force.
PS.
I keep on using “reference points” like:
Zapata,
Rossy,
OSPREY V22,
GEN-H-4,
EHANG-184,
skydivers,
wing suiters,
Ferrari etc
because this way the technical discussion departs from pure theoretical and deals with facts / with the existing practice and how the state-of-the-art can improve.
Thanks
Manolis Pattakos
Hello ExpAir (12 July 2018).
You write:
“ So lets say you have all this thrust to accelerate upward at 10m/s2 ('falling upward') - which would be an awesomely impressive amount of thrust , do you believe that your operator will be able to fly around as they choose, - with then portable flyer alone?
Yes.
The operator / pilot will be able to fly around as Zapata already does, and better.
Why better?
For a 10 miles or a 10 minutes flight, the total take-off weight of Zapata is 110Kg / 244lb:
Zapata’s weight is about 70Kg / 155lb;
at take off, he has another 20 Kg (44lb) secured on his feet (it is his Personal Flying Device weight);
at take-off, Zapata carries another 20Kg (44lb) at his back: it is the fuel required for 10 miles or 10 minutes of flight.
Why Zapata needs all this fuel for such a short range or time?
Because the jet-turbines cannot help running at very low thermal efficiency.
The 10 minutes is the fly duration limit for Yves Rossy, too, who carries (in his delta wing) even more fuel than Zapata.
When a guy who weighs as much as Zapata (70Kg /155lb) takes-off wearing the PORTABLE FLYER (20 Kg / 44lb), he needs for the same range (10 miles or 10 minutes) way less than ten times the fuel Zapata needs, which means less than 20/10=2Kg of fuel.
Do lift a weight of 18Kg to see how easy it is, and think how it is to carry it on the air when you fly.
Quote from my submission:
“Tradeoffs summaryA personal flying device must be lightweight.The more lightweight (including the fuel or the energy source) the better.Every oz of additional (beyond pilot's) weight requires additional power and additional fuel; the added weight makes the control of the flight more difficult, the landing more risky and dangerous, the noise louder, the range shorter, the mileage smaller, the emissions worse.A personal flying device must be as lightweight as possible; and because weight cannot be removed from pilot's body, weight can only be removed from the power unit and from the energy source (fuel or batteries).A lightweight power unit and, more importantly, a top fuel efficient lightweight power unit, is a good start.”
Thanks
Manolis Pattakos
Hello Dusan (12 July 2018)
You write:
“A typical 400lbs ultralight, including pilot, have L/D of about 10, and at straight and level flight it needs only 40lbs of thrust, power required of about 10KW.”
A number is missing: the speed.
In order to consume 10kW with 40lb (180N) thrust, the speed of the horizontal flight of the ultralight is (10,000 W / 180N ) = 55m/sec = 200Km/h (125mph).
You also write:
“To fight gravity all the time, I think is the wrong thing to do, it consumes fuel at a really fast rate, as demonstrated by zapata's board.”
I agree in that “to fight gravity all the time is the wrong thing to do”.
But Zapata’s extremely low mileage, only partly is justified by the “fight with the gravity”.
Rossy, who is based on a fixed delta wing, has a similarly poor fuel efficiency , a similarly short flight duration and a similarly short range with Zapata.
Both, Zapata and Rossy, are using a propulsion unit that does not fit with the specific application. Their jet-turbines are lightweight, but almost all the energy (~98%) of the fuel is lost into the exhaust gas; which means they need to carry a lot of fuel which cancels the advantage of the lightweight jet engines.
This is why no ultrlight uses jet-turbines.
Back to the “fight with gravity”.
Quote from my submission
Cruising / consumption / mileage
With the pilot wearing a wing suit or a tracking suit, at 100mph cruising speed (87kts / 160Km/h / 44.5m/sec) the required thrust is about 66lb (30Kp, 300N and the calculated power is 300N*44.5m/sec = 13.5kW = 18bhp (data taken from the “First jet powered Birdman flight” at http://www.dropzone.com/news/General/First_jet_powered_Birdman_flight_61 3.html )
End of Quote.
That is,
if the pilot of the PORTABLE FLYER wears a wing suit,
then at 160Km/h (100mph) horizontal cruising speed he needs only 18bhp of power, while in order to hover (at vertical position, as during the take off and the landing) it is required 4*15=60bhp of power (the calculations are in my submission at http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf, page 11 middle).
Flying horizontally at160Km/h (100mph) the PORTABLE FLYER needs about 1/3 of the power required for hovering.
Without a wing suit, the respective horizontal cruise speed increases.
After the take-off, the pilot of the PORTABLE FLYER has no reason to not turn to fast horizontal cruise at the optimal speed.
Thanks
Manolis Pattakos
Hello Birdman. (12 July 2018)
Quote from my submission:
Project execution feasibility
With the manufacturing of the two OPRE Tilting engines, the PORTABLE FLYER is
almost ready for tethered tests (four carbon fibre propellers, four toothed
belts, eight sprockets, two pipes and a saddle are all it takes to tailor the
PORTABLE FLYER on the pilot).
No need for electronics, nor for servomotors, nor for control surfaces etc.
A 333cc proof-of-concept OPRE Tilting prototype engine has been manufactured
and tested. The design modifications in order to become a 350cc
2-stage-Ignition OPRE Tilting engine is of minor difficulty.
After the tethered tests and the “tethered training” of the pilot, flying tests
at low height above the sea will follow.
. . .
The estimated total cost is 20,000+50,000=US70,000$ (not
including the personal work of the pilot).
The cost of the necessary machinery / facilities is included in the total cost
of the US70,000$.
E.g., by comparison to the PORTABLE FLYER project,
the more demanding “roller-version Variable Valve Actuation” project of
pattakon:
[a continuously variable valve lift and duration VVA presented at http://www.pattakon.com/pattakonRoller.htm , http://www.pattakon.com/pattakonRollerLight.htm and http://www.pattakon.com/DVA_files/pattakonVVAs.pps (the last link is the
presentation of the pattakon VVA projects at the Engine Expo International,
Stuttgart Germany, May 2008)],
and the modification of a used Honda Civic VTEC 1,600cc car (including the
re-programming / tuning of its electronic control unit),
had a total cost several times lower than the above estimated US70,000$.
Compared to the only two valve lift profiles (10.5mm maximum valve lift) of the
original mass production Honda sport car, the modified car provides infinite
continuously variable (from 0mm to 12mm) valve lift profiles (as shows
the http://www.pattakon.com/vvar/OnBoard/Vtec_files/ValveLifts.gif plot) and was for long
tested on the roads, with Its red line shifted from the 8,000rpm of the factory
car, to 9,000rpm for the modified prototype VVA-roller car (youtube video
at https://www.youtube.com/watch?v=-zzW8YkReLU ).
E.g., by comparison to the PORTABLE FLYER project,
the more demanding PatOP prototype 636cc Opposed Piston Diesel engine project
(analytically presented at http://www.pattakon.com/pattakonPatOP.htm ) had a total cost
(from designing, to patenting, to manufacturing a running proof-of-concept
prototype) several times lower than the estimated US70,000$.
In the youtube video https://www.youtube.com/watch?v=2ByEgfTTq1I it is shown the quality
of operation of this single-cylinder opposed-piston prototype Diesel engine
(wherein the only parts from the market are: the piston rings, the plain
bearings at the big ends of the connecting rods and the injection system).
At the end of the power point http://www.pattakon.com/opre1_files/pattakonOPRE.pps , a single-engine
PORTABLE FLYER was proposed at the Engine Expo 2008, Stuttgart Germany.”
Thanks
Manolis Pattakos
Hello ExpAir. (13 July 2018)
You write:
“I dont believe any aspect of what you are proposing is reasonable. Possible, maybe .... but reasonable ... no.”
Let me follow your “reasoning” and ask (with Zapata’s FlyBoard-Air as the reference point this time):
Do you believe that Zapata does fly?
And that he keeps an impressively strict and accurate control over his flight?
And that he flies horizontally at speeds above 100mph? (what is the “limit” you see? At what cruise speed should Zapata put the “red line”?)
And that he lands and takes-off as safely and easily as he does, without landing gearing? (at an “early” landing, say a few seconds after his take-off, he carries on his back ~20Kg (44lb) of fuel which means his body weight and the fuel weight are taken by his legs).
Is the upwards thrust force from the jet-turbines under his feet the only thing that powers Zapata? Is there anything else?
The PORTABLE FLYER can be looked at as a “FlyBoard-Air” wherein:
-the pushing thrust force (under the feet of the pilot) is replaced by a pulling thrust force (above the head of the pilot),
-the gas-guzzler jet turbines are replaced by lightweight reciprocating opposed-piston engines driving ~1m diameter propellers.
The PORTABLE FLYER is the conventional cart (the horse at front), while Zapata’s FlyBoar-Air is a “cart before the horse”. Both work.
Can Zapata change on pulling thrust? He could easily arrange his FlyBoard-Air above the pilot, with the fuel tank lower; but then the pilot would be roasted by the hot exhaust gasses.
You write: “I dont believe any aspects of what you are proposing is reasonable.”
Here are some “quite unconventional” aspects I am proposing in my submission
Would you be kind enough to spot on one (just one is enough) mistake in these “aspects”?
Quote from http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf
Pages 3-4):
Zero vibrations, zero gyroscopic rigidity, zero reaction torque:
• The symmetry of the engine, the zero phase difference between the two synchronized and counter-rotating crankshafts, the common combustion chamber (same instant pressure on the piston crowns of the two opposed pistons, same (and opposite) instant torque on the two crankshafts), and the symmetrical load (two counter-rotating symmetrical propellers) rids the saddle (and the pilot) of all kinds and orders of vibrations (zero free inertia forces, zero free inertia moments, zero free inertia torques, and zero combustion vibrations of all kinds). This is an absolute requirement when a powerful high revving engine is to be tightened to the body of a person.
• The reaction torque is also permanently zero: no matter how wide the “throttle” is opened, or how abruptly the “throttle” opens or closes, there is no reaction torque (the only that happens is the increase or the decrease of the thrust force provided by the propellers).
• The symmetry and the counter-rotation of the propellers and of the crankshafts maintains the gyroscopic rigidity of the PORTABLE FLYER zero. Even when only the one engine is running (for instance due to a malfunction of the other engine), the gyroscopic rigidity is zero. Zero gyroscopic rigidity means that the pilot “instantly” and “effortlessly” can vector the engine/propellers (i.e. the thrust force) towards the desirable direction, which is an absolute requirement for a safe, accurate and instantaneous control of the flight.
• Without zero inertia and combustion vibrations, without zero gyroscopic rigidity, and without zero reaction torque at the changes of the “throttle”, the control of the flight becomes slow, inaccurate, unsafe, uncomfortable and exhausting.
End of Quote
When it turns to numbers and maths, it doesn’t matter what you believe or what you like; because, as a wise man said: “nobody can argue with mathematics”.
Thanks
Manolis Pattakos
Hello ExpAir (13 July 2018)
You write:
“you will not have nearly the amount of control over your device that Zapata has over the Flyboard. Theres a fundamental difference. Can you see it? Tell me what you think it is! Im not saying you wont lift off, and i am not critiqueing an aspect of your motor system. Just your control. Now think about it and tell me why you wont fly like Zapata”
There is a “fundamental difference” between the PORTABLE FLYER and the FlyBoard-Air of Zapata.
At hovering and at small - medium speeds (say, below 75mph), while the head – limbs of Zapata are in a, more or less, “stationary air”, the head and limbs of the pilot of the PORTABLE FLYER are inside the strong downwash air stream of the propellers.
What the above does mean for the control?
It means that at small – medium speeds Zapata is based exclusively on the displacement of his weigh relative to the thrust force to control his flight (weight displacement control, as in the GEN-H-4).
It also means that Zapata’s FlyBoard-Air needs deflectors (as those in the exhaust of the two side jet-turbines) for the yaw control. Without them, Zapata has no yaw control.
Contrary to the above, the pilot of the PORTABLE FLYER has, from take-off, to hovering, to any available speed, dual control over his flight:
on one hand by displacing his weight relative to the thrust force (as Zapata),
and on the other hand by deflecting with his head – limbs the high speed air stream coming from the propellers: the deflectors are his own arms and legs.
Quote from my submission:
“The heavy disk loading (thrust to disk area) of the PORTABLE FLYER (similar to that of the OSPREY V22) causes a high downwash velocity, with the pilot inside it. Either at take off / landing, or at hovering, or at cruising (low / medium / high speeds), pilot’s limbs and head are in a high velocity air stream, which allows the control over the flight in a way similar to the way the skydivers control their flight / fall. The PORTABLE FLYER besides the “weight displacement CONTROL” of the GEN-H-4 (mentioned previously), has also the “aerodynamic CONTROL” of Yves Rossy”
End of quote
PS. The attached youtube video is a 500cc single cylinder, opposed piston, OPRE Diesel engine. Imagine you are the pilot behind the downwash air stream of the propellers.
http://www.youtube.com/watch?v=64TY-x2Cj6Y
Thanks
Manolis Pattakos
Hello Flapping Flight. (13 July 2018)
Thanks for the video. At the 1:07 it shows the downwash air stream I was talking about.
You write:
“The flying machine for everybody must to protect the passenger (pilot ) from the harsh enviroment conditions so he/she must to be enclosed inside of the cockpit, any other configurations where passenger(pilot ) is exposed to high speed wind , low temperatures , rain etc is maybe for some very brave heads but I guarantee you it's not for everibody “
Zapata flies at 100mph and is one of the most spectacular shows, ever.
There are millions of motorcycles and scooters on the roads. A good percentage of them travel faster than Zapata and have no cockpits; the riders control the ride by their bodies movements and by their bodies aerodynamics.
Try to convince the motorcyclists to be enclosed in cockpits.
If Rossy was enclosed into a cockpit, he could not control his flight and he would miss the best part of the joy: “the open air experience”.
With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators. “I am the fuselage, Rossy says, and the steering controls are my hands, head and legs”
"You feel very well, you feel the pressure," Rossy says, "you just have to wake up these senses. Inside an airplane we delegate that to instruments. So we are not awake with our body."
You also write:
“on the craft design what I think is that it is too minimalistic, probably difficult to control it and not safe”
I wish I could make it half the size it is now, or even smaller.
What is the relation of the size with the control?
Is there any better (more precise) control than what we see in Zapata’s and Rossy’s videos?
The smaller the size and the weight, the easier the control.
Thanks
Manolis Pattakos
Hello Flapping Flight (14 July 2018)
You write:
“The motorcyclists are probably less than 1% of all traffic participants”
No.
Statistics from China:
2013: 23 million motorcycles were produced (40% of them exported)
2014: 23 million cars were produced (which represents the 26% of the 88 million global car production in 2014).
Even if no other country produces motorcycles, the above numbers say that for each 5 motor-vehicles (cars and motorcycles) produced globally, the one (i.e. 20%) is a motorcycle. The actual percentage seems about 30% (because millions of motorcycles are produced outside China).
In countries like China and India, the number of motorcycles on the roads is comparable to number of cars.
HIGH SPEED
You write:
“Also 100 mph is too high speed to be exposed on it for too long ! Where are this speed limits ( I want to go there :))? Only in Germany on some interstates doesn't have speed limits!”
For a specific destination, say 150 miles away,
and flying at 150 mph (240Km/h) instead at 50 mph (80Km/h),
the duration of flight reduces to 1 hour from 3 hours.
At 150mph the fuel consumption reduces (50mph is closer to hovering, and hovering is the worst thing for the mileage).
As Dusan wrote: “To fight gravity all the time, is the wrong thing to do”).
Rossy flies at such speeds (150mph) for fun, for joy.
The worst moment of the flight is when his fuel ends and he has to use his parachute.
For less than 10 minutes of flight duration, he suffers a lot (among others he cannot help using a helicopter to lift him a few thousands feet).
If he could extend the flight duration from 10 minutes to a couple of hours, and if he could avoid the helicopter and the risky parachute-landing, he would be the happiest man.
So, do believe what Rossy says expressing his flight experience and don’t suppose that flying at 150mph is a punishment for the pilot; the contrary: it is a blessing (to fly like an angel).
He was a pilot in a cockpit, and now he is a rider in the open air.
So, we have better to believe him.
The same is true for the skydivers of the video in a previous post. When the speed exceed 150 – 200 mph the fun starts.
The same for “in house” flying / “dancing in the air”; see the attached video https://www.youtube.com/watch?v=-Aw-qjG2zEI from 2:25 and after. The speed of air is high. Look at the young dancer the moment she exits.
HIGH SPEED and SAFETY
At 150mph speed, besides the flight duration, the need for refuelling / recharging reduces.
The most dangerous part of the flight is the take-off and the landing (i.e. when the pilot flies near the ground).
The “safe speed limit” on a road or a highway has nothing to do with the safe speed limit on the sky.
SIZE
You write:
“The size of the device ( exept for the GoFly competition ) doesn't matter”
It matters a lot.
If you have two similar vehicles, the one 50% scale-down of the other, the big one needs four times the power of the other and four times the fuel of the other for the same weight and speed and range. If the weight increases with the size, things get even worse (think: if you need four times more power, you need a bigger / heavier engine and more fuel).
So the size does matter, and the weight matters even more.
The Personal Flying Device must as small as possible, as lightweight as possible and as streamlined as possible.
See the plots at http://www.pattakon.com/Fly_files/Drag_Area_Human_Aerodynamics.png and http://www.pattakon.com/Fly_files/Human_Drag_Various_Positions.png
When the pilot of the Portable Flyer is “lying” (supine) almost horizontal on the air, his frontal area is more than three times smaller than when he is standing, and his drag coefficient is more than three times better than when he is standing.
In total the aerodynamic drag force drops more than 10 times relative to when he would fly standing.
Imagine a Harley Davidson rider travelling at 100mph on a Germany Highway; he is almost standing in the air, which means he needs some 10 times the force (and the power and the fuel) he would need if he was cruising horizontally, at the same speed, with the PORTABLE FLYER).
So, the size and the weight are the most important components when a useful transportation means that will fly in the air is to be designed.
You also write:
“Isn't the GoFly vision was the device to be usable for everybody ?”
Here is another GoFly vision: “GoFly is about flying people, not flying taxis.“
And another GoFLy vision: “the device should be user-friendly--almost an extension of the user’s body, and provide the thrill of flight.”
Don’t take them too seriously.
They have various incompatible visions.
Even the 20miles range is a vision for them!
Their credibility is questionable, at least (does anybody know his scoring, or ranking, or the judges justification for his submission? It is more than two months from the Phase I Awards Issue).
You also write:
“the people aren't birds”
Quote from the submission:
“the human brain and the human senses / body are adequate (just like the brain, body and senses of the birds, bugs and bats) for safe controlled flights.
The problem is that the human body is not adequately strong to provide the required power for the flight.
What a human needs in order to fly is plenty of power provided, if possible, in a completely neutral way.
This is what the PORTABLE FLYER is: it is like an extension of the human body and it is providing the required power in a true neutral way. The brain, the senses and the muscles do the rest”
End of Quote
As compared to the birds, the only we lack in order to fly is the power.
Do not believe me.
Believe Rossy who:
"flies with the grace of an eagle, and the subtle body movements he uses to maintain flight - and perform his loops, rolls, and other maneuvers - mimics a bird of prey".
With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators.
“Arching his body “like a banana” from head to toe allows him to fly horizontally; subtle movements from left to right will change his flying direction.
“I am the fuselage, and the steering controls are my hands, head and legs,” Rossy says.
He knows better than you and me.
You also write:
“Have you been striked in the face or naked parts of the body by relatively larger insects guys , even with speed much lower than 100 mph ? I have ( and the expirience isn't pleasent )but haven't been striked by bird yet and probably that's why still alive .”
This is a minor problem for the motorcyclists and for the passengers of convertible cars.
Even when you walk on the ground, a bird can strike you, or shit on you.
And a bee can sting you.
And a dog can bite you.
Etc, etc.
Come on.
The real danger when you fly is to fall and strike the ground.
All the rest are like jokes.
The safety should minimize the possibility of such an event (to strike on the ground).
The accidents happen mostly when the flight is in bad weather conditions.
And this danger increases a lot for big / underpowered / slow moving Flying Devices.
Your passenger is “protected” inside the cockpit, but he is in a big underpowered vehicle which is at the mercy of the winds, a “feather in the wind” when the wind blows strongly.
Quote from the submission:
The ability for high speed flights is mandatory for the safety; at windy weather a big size / slow moving (“hovering”) flying device is a “feather in the wind”. A personal flying device having 30 kts maximum speed and flying along a sea shore, has a big safety risk when the wind starts blowing towards the sea at, say, 35kts.
End of Quote.
When flying in the air, what matters above all is to master the air, to stay in the air and to land safely.
A compact, lightweight, overpowered, high speed Personal Flying Device is far safer than a big, heavy, underpowered, slow (but comfort) one.
If I had to fly in adverse weather conditions (say for a rescue) I would pick the smallest, the lightest, the simplest, the most powerful, the easiest to directly control device.
Thanks
Manolis Pattakos
Hello ExpAir. (14July 2018)
You write:
“Manolis - the big difference ... is the angles that Zapata can adjust his thrust line to with immediate effect. As in my composite image - he can manipulate the thrust line greatly, not to mention of course the vectored side thrusters. Can your operator achieve this? I think not. Not even close. Can you attach an image showing the maximum thrust line adjustment that you can achieve. Zapata essentially has a fully flexible thrust mounting - because they are on legs. Yours is close to a semic rigid mount and you have pendulum stability to overcome.”
Here is the image you asked.
http://www.pattakon.com/PatTol/Pilot_Accelerating_Decelerating.png
At left the pilot of the PORTABLE FLYER accelerates.
At right the pilot of the PORTABLE FLYER decelerates strongly.
The colours used are similar with yours.
So the leaning of the thrust force versus the horizontal speed can be as, or bigger than, Zapata’s.
But is is more than this.
As explained in a previous post, the big difference is that at small-medium speeds Zapata’s body is not in a fast moving air, so he cannot use his body (head, arms) as ailerons for the aerodynamic control of his flight,
while the body of the pilot of the PORTABLE FLYER, from the take-off to the landing, is permanently inside a high speed air (downwash stream of propellers), which enables him to control his flight by both:
by weight-displacement control (as Zapata and GEN-H-4),
and by aerodynamic control (as Yves Rossy).
Thanks
Manolis Pattakos
Hello ExpAir. (14 July 2018)
You write:
“ both of those positions are not achievable by your operator and flyer. You can draw the images but I'm telling. Position 1 is not achievable from hovering flight, and position 2 is only achievable as a pendulum reaction - not as a controlled action. If you dont believe me - build a half scale RC model and see for yourself. Not possible !!”
Quote from the submission
Just like driving a bicycle, the eyes / otoliths / body / brain of the rider / pilot of a PORTABLE FLYER are the sensors and the control system: the rider soon discovers the way to react properly and to keep the control.
. . .
In a PORTABLE FLYER it is better to be used the body of the pilot as the main sensing and controlling equipment (birds like), than developing and paying and carrying stabilizing and flight management systems.
. . .
The body, the eyes and the senses of the pilot/rider are available; why not to use them as the fuselage, the sensors and the control system? Isn’t this what the birds are doing?
End of Quote
To scale a human is not possible.
As Yves Rossy’s Flying Device, similarly the PORTABLE FLYER is basically its pilot; the engines-propellers are there only to provide the required thrust.
So, the half scale RC model you propose is not useful.
Full scale is the way to go.
Did you see the last video (the air-tunnel-dancing) and the way the dancer controls her body pose?
All she has to interact with, is the high speed air stream around her, and her body weight.
Similarly, the pilot of the PORTABLE FLYER is inside a high speed air stream all the time, even during the take-off, even during hovering, even during the landing.
The GIF animation at http://www.pattakon.com/Fly_files/Hover_to_Cruise.gif is explanatory on how things will work:
Initially the pilot with the PORTABLE FLYER on his shoulders ascends.
Then he stops ascending and hovers.
Then displacing properly his legs / arms in the downstream of the propellers, is pushed by a pair of eccentric aerodynamic forces (i.e. a twisting moment) that cause the rotation (yaw) of the Portable Flyer about its vertical axis towards any direction.
From hovering to cruising:
The pilot bends his waist to
displace his legs forwards for, say, some 45 degrees shifting the center of
gravity ahead the plane of the propeller axes and deflecting forwards (with his
legs and feet as ailerons) a part of the high speed downwash air stream of the
propellers.
The displacement of the center of gravity combined with the backwards force on the legs / feet of the pilot, turns the PORTABLE FLYER quickly and substantially.
I.e. the leaning of the thrust force is caused by the displacement of the center of gravity and by the deflected, by pilot’s legs, air stream.
If something is still confusing, let me know to further explain.
Thanks
Manolis Pattakos
Hello Expair. (15 July 2018)
Thank you for you time to think and prepare your last two strictly technical posts (analysis and drawings).
There is a mistake:
the “thrust point” (i.e. the pivot about which the “pendulum” swings) is not where you locate it.
While in the GEN-H-4 the pivot is high, above the head of the pilot,
in the PORTABLE FLYER the pivot is below the shoulders of the pilot; say, in the “center” of the saddle.
So, the thrust force turns not about the center of the propellers, but about the “center” of the saddle (the engines with the propellers are secured on the saddle).
In case the above are not yet clear:
suppose that the side holed pipes, at the top of which the propellers are rotatably mounted, are way longer (say 10m).
These pipes are secured on the saddle, which is fastened on the shoulders / torso of the pilot.
Forget for a second the mass and the center of gravity of the engines, and concentrate on the thrust force from the propellers:
for the saddle and the pilot, either the centers of the propellers are located 0.5m above pilots head, or 10m above pilots head, it is the same: the saddle “feels” only a force along the direction of the side pipes of the frame.
You have to spend the required time to repeat your calculations, this time with the correct “pivot”.
Instead of using 1.15m for the moment arm (according yours: “I have used a value of about 1.15m for moment arm from thrust point to CG”),
you have to use the correct “moment arm”, which is several times (say 4?) shorter.
You also write:
“By the way - I highly recommend the rotors being out of hands reach - all I keep seeing is a lot of potential shredding.”
Quote from the submission (http://www.pattakon.com/GoFly/index.html abstract). “The saddle prevents the pilot from lifting his hands above his shoulders, thereby protecting them from the propellers.”
If it is not clear, see the photo http://www.pattakon.com/tilting/PatTilt_Flyer.jpg and the drawing http://www.pattakon.com/tilting/PatTilt_Flyer_Frame.gif : the metal frame comprises two “epaulets” (the “horizontal” semi-circular pipes a little above the armpits) which make impossible the hands to reach the lower propeller (no matter how hard the pilot try to).
Thanks
Manolis Pattakos
Hello ExpAir. (16 July 2018)
You write: “I wont try and correct you any more.”
Don’t try to correct, try to learn something.
For instance,
have you ever heard about “equivalent force systems”?
Quote from http://emweb.unl.edu/NEGAHBAN/EM223/note8/note8.htm
Two force systems are equivalent if they result in the same resultant force and the same resultant moment.
Moving a force along its line of action:
Moving a force along its line of action results in a new force system which is equivalent to the original force system.
http://emweb.unl.edu/NEGAHBAN/EM223/note8/IMG00002.GIF
End of Quote
The above is an Internet publication of:
Mechanical & Materials Engineering
College of Engineering
University of Nebraska–Lincoln
You can find similar publications coming from the MIT and other universities.
Now, read again my last post and apply the above.
There is no specific “point of thrust”; only a line along which the thrust acts.
If something remains confusing, let me know to further explain.
I am not intending to “leave” the discussion until everything is cleared out.
Thanks
Manolis Pattakos
Hello Gary Gress (16 July 2018)
You write:
“Also, for the same reason, there is no pendulum effect in this design.”
In the PORTABLE FLYER design there is, among others, “pendulum effect”,
with the pivot (or gimbal joint) being near the middle of the thoracic spine (the “line of thrust” can swing about said pivot, or equivalently, the lower body of the pilot can swing about said pivot).
The pilot can control his PORTABLE FLYER in various different ways, one of which is the way the pilot of the GEN-H-4 controls his Personal Flying Device.
Thanks
Manolis Pattakos
Hello ExpAir
You write:
“Let me know if I have something wrong in the calculations - but I think its ok this time”
Your new calculations are wrong.
You keep on using a “thrust point” (a point at the height of the engines), then you calculate a moment of 550Nm etc, etc, etc.
Start thinking with the “line of thrust”.
With the Center of Gravity (CG) on the “line of thrust” the moment is zero / null.
Thanks
Manolis Pattakos
Hello Dennis K (16 July 2018)
The stability of the Portable Flyer at take-off, hovering
and cruising is dynamic; it is similar to the “dynamic” stability during
walking, wherein the brain “feels” (mainly by the otoliths and the eyes) and
responds by commanding the various muscles to expand or contract.
At take-off / hovering / cruising / landing
the brain of the pilot of the Portable Flyer “feels” (otoliths, eyes, ears and
skin) and responds by continuously / dynamically re-vectoring the thrust (say,
by bending the spine and the shoulders (whereon the engines / propellers are
fastened) at various directions relative to the rest body). Without zero
gyroscopic rigidity it would be from difficult to impossible.
But this is not the only way to control his flight; the pilot can, alternatively, use his head and limbs as ailerons (just like Yves Rossy) to deflect the fast air stream wherein his body is.
Dynamic stability means: the brain works without breaks,
feeling and adjusting and controlling and commanding and correcting.
The same is the case during a walk: if you
“switch off” the “brain” for just a second (faint), you collapse.
The XFY-1 (at
https://upload.wikimedia.org/wikipedia/commons/8/84/Convair_XFY-1_Pogo_2.jpg )
has a pair of contra-rotating rotors at its nose.
The same for the XFV-1 (at https://i.pinimg.com/originals/c7/61/f6/c761f642139545d9428b472875b618cc.jpg ).
Standing “nose-up” on the ground, the XFV-1 and the XFY-1
remind the Portable Flyer.
An airplane cannot have the legs, feet, hands,
palms, head and torso of the pilot of the Portable Flyer or of Yves Rossy. This
makes it necessary to add to the fuselage of the airplane dummy limbs and flaps
and rudders for its control.
Open the youtube video https://youtu.be/EABQ6cKzxaQ
Go to 1:03 (vertical take-off and then transition to horizontal cruise of the XFY-1) then go to 2:30 (vertical landing; look at the ailerons, the only control system. And how they play), then go to 3:43 (XFV-1, transition from hovering to cruising; look at the leaning angles it achieves before gathering a significant horizontal speed).
The pilot of the PORTABLE FLYER has a similar aerodynamic control: he can use his legs, arms, head as the pilots of the XFV-1 / XFY-1 use the flaps / ailerons.
But the pilot of the PORTABLE FLYER has additional control means, too. He can bend his spine to redirect the “line of the thrust” relative to the center of gravity. He can also re-arrange his legs, arms displacing his center of gravity. And the pilot, who is in the open air, is 80% of the total gross weight and is “flexible”.
Thanks
Manolis Pattakos
Hello Gary Gress. (17 July 2018)
So,
when the pilot of the PORTABLE FLYER “locks” his spine / shoulders immovable, then there is no pendulum effect,
and when he uses his spine – shoulders as a built-in gimbal joint / pivot, then there is pendulum effect.
Thanks
Manolis Pattakos
Hello ExpAir
You keep on refusing the maths / physics laws.
You also keep on asking for scale prototypes and videos to check this or that theory.
Come on.
I already posted the https://youtu.be/EABQ6cKzxaQ video wherein they happen all these you can’t accept can happen.
For instance, you can see leaning angles near 90 degrees at very low horizontal speeds.
Worth to note here: when an aircraft like the XFY-1 leans, the requirement for a, more or less, constant vertical component of the thrust (it takes the total weight) results in an increased with the leaning angle horizontal component of the thrust, and this inevitably accelerates horizontally the aircraft.
The only control system of the XFY-1 is the four ailerons at the bottom of the “standing” (nose-up pose) aircraft.
At take-off and landing these ailerons are so close to the ground that the air-stream generated by the contra-rotating propellers (some 10 meters above the ground) is quite difficult to reach the ailerons.
However the pilot still achieves to keep control.
The extreme leaning angles of the XFY-1 simply prove that your analysis and calculations are wrong.
Open your mind and read again the previous posts; you will learn new things, for sure; like, for instance, what are two “equivalent force systems”, what “line of thrust” is, etc.
In comparison to the XFY-1, the pilot of the PORTABLE FLYER at take-off and landing can use not only his legs / arms as ailerons, but he also can use his spine / shoulders to redirect the “thrust”, achieving a better / stricter control over his flight as compared to the XFY-1 (in the XFY-1 the rotation axis of the contra-rotating propellers is fixed on the aircraft).
ExpAir,
from your nick name (Expert of the Air) I suppose you have qualifications over aerodynamics, flying, mechanics etc.
I guess you could be a mentor of GoFly, or a Judge of the GoFly contest.
Quote from the last paragraph of the “ABSTRACT” at http://www.pattakon.com/GoFly/index.html :
7.4. Risks1) The judges to not value the importance of the lighter weight for a flying device.2) The judges to not value the importance of a longer range and of a higher speed, especially at adverse weather conditions.3) The judges to not appreciate the simplicity, the instinctive control and the benefit - cost ratio. End of Quote. If I were writing today the “Risks”, I would add: 4) The biggest risk is the judges to understand nothing about how the PORTABLE FLYER will fly, and to understand nothing about how the PORTABLE FLYER is controlled (i.e. about the dynamics and about the aerodynamics of the PORTABLE FLYER). This is why I keep on asking to see the scoring / justification for my submission for the GoFly Phase I. ThanksManolis Pattakos
Hello all. (18 July 2018)
20 days ago,
I made a request for a Submission Reviewer to review my Phase I submission BEFORE BECOMING a "Phase II team".
My request is not yet answered by GoFly / BOEING.
I am still waiting either for the review of my
submission, or for the reasoning of GoFly / BOEING according which my request
is unreasonable.
10 days ago,
I asked if there is a "Phase II Team" that requested and received such a review for their submission.
No response yet.
I wonder: are there any teams registered for “Phase II”?
Proposal:
At the header of their web pages, GoFly can include not only the visitors and the followers (some 287,000 and some 3,000 respectively, so far), but also the numbers of submissions of Phase I (164) and the number of registered teams for phase II.
This info will be useful for all: those willing to register and those who won’t
Anybody who disagrees?
Thanks
Manolis Pattakos
Hello Gary Gress (18 July 2018)
Thank you for sharing your so far experience in Phase II (traumatic, I would say).
Let’s suppose that your new reviewer is the best (the most capable) reviewer of the world.
Here are two possible scenarios:
Scenario 1:
After reading your submission and after listening to your arguments, your reviewer is of the opinion that your submission is a great solution for a “Personal Flying Device” as defined by the GoFly contest.
Wouldn’t your reasonable next question, to your reviewer, be:
“Is my submission better than some, or all, of the 10 winners?”
Suppose that GoFly does give permission*** to your reviewer to access and study the submissions of the 10 winner’s of Phase I, and that after studying them, your reviewer is of the opinion that you do deserve to be a winner.
(Or suppose that your reviewer is also the reviewer of a winner of Phase I, so he does know both submissions and his opinion is that yours is by far better than that of the winner).
Then what?
Will they change the list of the winners?
Will they publish their mistake?
Will they give you the 20 grand?
Will they refuse the 20 grand to the presently 10th winner?
Scenario 2:
After studying your submission and after discussing with you, your reviewer is of the opinion that your submission / solution has fundamental mistakes and that it cannot work in the real world; and he does persuade you to abandon it.
This is the most possible scenario for most submissions: the experienced engineer points at serious mistakes of the inexperienced amateur (who, typically, has not a good understanding of the physical laws).
In such a case, what is the reasoning to make the expenses, and get through all the trouble, in order to register for the Phase II?
This is completely unreasonable.
A kind of blackmail:
If you don’t pay to register for phase II, you lose the right to know the mistakes of your Phase I submission (i.e. you lose the right to know if it is worthy to proceed with the Phase II).
You can call it: GoFly’s vicious circle.
Are the heads of the GoFly / BOEING contest so stupid, or they pretend they are for the sake of gathering fees?
Didn’t they consider the case the reviewer strongly disagrees with the judges decision?
As you see, the reviewer (who is not a judge) further complicates things in the GoFly contest..
Hey, GoFly heads, the only reasonable and honest way is to give the records of the 97 judges to the contestants.
This is called “transparency” and “confidence” to your contest and to your judges.
By the way, do read my post at https://www.herox.com/GoFly/forum/thread/3199?page=2 about the “double trick”.
PS.
The payment of the 200 grand to the ten winners is an honor for the winners and an honor for the GoFly.
Why all this secrecy?
Thanks
Manolis Pattakos
Hello Gary. (19 July 2018)
You write:
“I have some
further info on the review process:
Boeing engineers volunteer to review our
submissions. So, they have to find time between family and work to do this.
With Boeing being a business with hard competition, this shouldn't be a
surprise.
It means too that the engineers may be reviewing
your submission while on vacation.”
Thank you for the new piece of info.
If I got it correctly,
some enthusiast BOEING engineers offered voluntarily - i.e. for free, i.e. without any cost for the BOEING – a part of their free-time to review submissions of the GoFly Phase I contest.
And in order to connect (to bring in touch) a contestant of the Phase I GoFly contest with a volunteer BOEING engineer, GoFly requires the contestant to register for the Phase II (i.e. to make a team, to pay additional fees, to make a company, to give equity rights to GoFly, etc; in general to pay, and pay, and pay, and to sign papers).
Do the volunteer BOEING engineers know the above?
I.e. that GoFly capitalizes on their own free-time, and on their own enthusiasm, and on their own good will?
Would you mind to send me (at man@pattakon.com) the e-mail of a BOEING engineer who volunteers to review GoFly Phase I submissions?
Alternatively, can you ask a BOEING engineer who volunteers to review GoFly Phase I submissions, to take a look at http://www.pattakon.com/GoFly/Submission.html where my complete submission (as filed) is?
As for the Intellectual rights Milo writes, my submission is open to everyone.
For the rest 152 losers: it may be the time to think out of GoFly’s box.
Thanks
Manolis Pattakos
Hello RealDeal (20 July 2018)
You write:
“The challenge in aviation in today's world is to come up with the perfect design of a vehicle for a certain purpose.”
“The perfect” design?
There is no perfect design.
However there are already brilliant designs for Personal Flying Devices that prove their degree of excellence flying in the air.
The best, so far, seems the FlyBoard-Air of Zapata, that fulfils brilliantly most of the GoFly’s “visions” as they are presented at https://www.herox.com/GoFly):
The dream of pure human flight. . .
Not about flying taxis. . .
To look to the sky and say: that PERSON is flying. . .
Lightweight and manoeuvrable. . . .
Almost an extension of user’s body. . .
Look at the youtube video https://www.youtube.com/watch?v=VzotFLMEQrQ and think if Zapata’s design and built fulfils the above “visions”.
Can, anybody of the ten winners of GoFly Phase I, compare to Zapata’s solution?
Zapata is not the only one.
Quote from http://www.dailymail.co.uk/sciencetech/article-5967023/Leaving-jetsuit-London-store-offers-chance-hover-like-Iron-Man.html in yesterday headlines:
“Leaving on a jetpack? Selfridges' flying 'Iron Man' suit is now on sale to the public (but it will set you back $440,000)
London-based store Selfridges is allowing nine consumers to buy their own personalized version of a jet-propelled 'Iron Man' suit, for the price of £340,000
The jet suit was created by British inventor Richard Browning, a former trader
It's made up of five miniature jet engines, weighs 59lbs and has 3-D printed parts”
“The JB11 is the latest creation from Californian company Jet Pack Aviation, and is making its European debut at Goodwood. The pack is notable for a few achievements, perhaps most importantly that it is the first jet pack to receive certification from the Federal Aviation Administration.
JPA says the JB11 capable of reaching 200mph(!) and flying at more than 10,000 feet for up to 12 minutes. It has six 'turbojet' engines - four for power, two for emergencies - which can be powered by jet fuel or diesel, and are controlled by the handle on the pilot's right side. Perhaps best of all, the controls also feature a button for a VTOL (vertical take-off and landing) system, which Jet Pack Aviation says is a world first. Apparently there were similar 'rocketbelt' packs in the 60s, which could achieve the same thing, but ran on H2O2 fuel and could only fly for 30 seconds.”
So, the idea should be not about “re-inventing” the wheel, but about “improving” the wheel.
The above Jet-Packs have some weaknesses like:
the price,
the noise they emit,
the short range,
the short flight duration,
the small mileage.
Can these significant weaknesses / drawbacks be cured without compromising with their existing good characteristics?
This should be the “million dollars question”.
Thanks
Manolis Pattakos
Hello all. (20 July 2018)
So, I have to redirect my request to the right recipients:
To any contestant whose submission is under review by a volunteer BOEING engineer:
Would you mind to send me (at man@pattakon.com) the e-mail
of a BOEING engineer who volunteers to review GoFly Phase I submissions?
Alternatively, can you ask a BOEING engineer who
volunteers to review GoFly Phase I submissions, to take a look at http://www.pattakon.com/GoFly/Submission.html where
my complete submission (as filed) is?
In case a Boeing Engineer is reading this discussion, I’m ready to pay for his time.
Thanks
Manolis Pattakos
Hello RealDeal. (20 July 2018)
You write:
“This kind of flying machines are for super heroes and not the average Joe. If someone comes up with a machine that is as easy and as safe as riding a medium power motorbike, then it is a winner. Catering for 80% of the able bodied population.”
Zapata’s FlyBoard-Air is not for super heroes.
His other FlyBoard (EZ) is for ordinary people.
In the attached image (at http://www.pattakon.com/PatTol/JetPacks_vs_Portable_Flyer.png), the three at left already fly.
Thanks
Manolis
Hello all. (20 July 2018)
The three jetpacks shown in the attached image, at http://www.pattakon.com/PatTol/JetPacks_vs_Portable_Flyer.png , already fly.
Quote from https://newatlas.com/jetpack-aviation-mischa-pollack-jb-10-civilian-pilot/48546/
"This is proving we can train pretty much anybody," Mayman told us. He explained that Paris and Jarry became competent enough to control the Jetpack after just three hours of training. "I think this speaks to the stability of the machine and the intuitive nature of flying this thing; it really is like a bike."
"My feet got really hot," Pollack quipped in between flights, just before stepping into a bucket of water prepared for that exact purpose.”
End of quote
Mayman : “intuitive nature of flying the JB10 jetpack: like a bike”
By the way,
can anybody point at “big differences” between the flight control of the XFY-1 and of the PORTABLE FLYER?
Thanks
Manolis Pattakos
Hello Dennis K.(21 July 2018)
You write:
“Portable Flyer's behavior will be much more similar to XFY-1 than to GEN H-4, which has a pivot just below the rotors. As said before, my long analysis post failed to account for torque due to horizontal thrust. There's no pendulum stability at all.”
Aerodynamic control at hovering, take-off and landing:
With 4m rotors diameter and about 50% increased total weight (the dry weight of the GEN-H-4 is 70Kg) , the downwash speed is calculated near 60% of the downwash speed of the PORTABLE FLYER (which means the forces on any ailerons / surfaces drop 2.5 times).
And there is more: the pilot of the GEN-H-4 is just below the center of the big diameter (4m) contra-rotating propellers, which means that the air stream the pilot sees” is by far slower than the (above calculated) 60% of the air stream the pilot of the PORTABLE FLYER sees.
I.e. the pilot of the GEN-H-4 has no aerodynamic control over his flight at hovering, at take-off and at landing.
Pendulum stability:
The middle of the thoracic spine is a built-in gimbal joint / a pivot. And the center of gravity of the PORTABLE FLYER is below this pivot.
As explained in previous posts:
“when the pilot of the PORTABLE FLYER “locks” his spine /
shoulders immovable, then there is no pendulum effect,
and when he uses his spine – shoulders as a
built-in gimbal joint / pivot, then there is pendulum effect”.
Can you please be more specific about the lack of pendulum stability of the PORTABLE FLYER?
Gary Gress who has a “similar design” has thought a lot about it. Read his posts.
You also write:
“I think it will be pretty twitchy and difficult to control at low speed. At high speed, there will be enough aerodynamic force from the oncoming air to damp your angular momentum, and it will handle nicely like Rossy's wing.”
At low speed the PORTABLE FLYER will be more stable than the GEN-H-4 (which is remarkably stable; look how calmly the pilot controls it at hovering) because:
it is more symmetrical than the GEN-H-4,
it has the “weight shifting control” of the GEN-H-4,
it, additionally, has aerodynamic control (head / limbs into the high speed downwash air stream of the propellers).
Either at take-off, or at landing, or at hovering, or at high cruising speeds, the pilot of the PORTABLE FLYER is inside a fast (always above 90mph) air stream, his legs / arms deflecting the air stream take (as reaction) significant forces by which the flight is controlled.
With the pilot of the PORTABLE FLYER bending his body and limbs, the center of gravity is displaced, which is the only available control of the GEN-H-4.
You also write:
“At low speed, you only have aerodynamic force from the airstream coming off the propellers, which rotates with you so it won't damp your angular momentum.”|
Quote from the submission at
“Counter-rotating and contra-rotating propellers
The left upper and the left lower propellers compose a pair of “contra rotating” propellers (the one driven by the right engine, the other driven by the left engine, both rotatably mounted on the same pipe).
The right propellers comprise another pair of “coaxial” contra-rotating propellers.
The two engines operate independently from each other and can run at different revs if desired (to optimize the overall thrust and mileage). For instance, if the lower propellers are similar (same diameter, same pitch, same design etc) to the upper ones, the lower engine may run at different rpm to align its propellers with the different air stream they “see” as compared to the air stream the top propellers “see”.
The set of the four propellers can be regarded as two “contra rotating” sets of counter-rotating propellers.
A common characteristic of both, of the contra-rotating propellers and of the counter-rotating propellers, is the higher thrust to power ratio.”
“Zero vibrations, zero gyroscopic rigidity, zero reaction torque”
End of Quote.
What I see is a better symmetry than that of the GEN-H-4.
If the pilot wants to yaw, he has just to extend his one foot forwards and the other backwards.
If the pilot wants to pitch, he keeps he can either “freeze” his spine bending his waist in order to displace both legs forwards or backwards, or he can bend his spine (as a pivot joint) to redirect the propeller axes, or both intuitively.
After reading the above quote, please be more specific for what you mean by “rotates with you” and by “won’t dump your angular momentum”
https://www.youtube.com/watch?v=y1CVZ-Ir260
Thanks
Manolis Pattakos
Hello ExpAir (21 July 2018)
You write:
“Thats ok - since thats probably your target - you wanted a fast flyer. So now the question is - how much drag can you generate - enough to tilt you? - and remember this is not total drag - this is only the drag from your waist down - since the drag above and below CG will counter each other - so it only leaves you with the lower abdomen and legs as an extremety. and then also how much thrust you have available to achieve the desired thrust vectors as you transition.”
When you get the meaning of the “line of thrust” (versus your “point of thrust”) you will understand how easily the PORTABLE FLYER can tilt from vertical to horizontal.
Suppose the PORTABLE FLYER is hovering with the limbs and head of the pilot aligned with pilot’s long axis.
The “line of thrust” passes from the center of gravity.
Now suppose that, somehow, the system turns for 5 degrees about the center of gravity.
The propeller axes turn for 5 degrees, however the “line of thrust” still passes from the center of gravity.
Is there a moment (a pair of forces) to restore the pilot / PORTABLE FLYER at their up-right (vertical) position?
There is no such restoring moment. None at all.
If, somehow, you manage to push pilots feet at some direction, he will start yawing, or tilting / pitching, or rolling about the center of gravity endlessly.
Depending on the direction of the initial push, he can turn upside-down, and then up-right, and then upside down again and so on,
or he can yaw with his long axis at 5 degrees,
or . . .
So, the problem is not how difficult it is to tilt (it is quite easy), but if you can control the magnitude of the tilting.
And the pilot of the PORTABLE FLYER has various kinds of control: weight shift control and pendulum stability (as the GEN-H-4 and the FlyBoard-Air of Zapata), aerodynamic control (as the XFY-1 and as Yves Rossy but from zero horizontal speed).
With reference to the image at http://www.pattakon.com/PatTol/JetPacks_vs_Portable_Flyer.png :
Theoretically, Mayman could use his limbs under the jet exhausts to deflect the hot gas and control his flight similarly to the PORTABLE FLYER: yaw and tilt / pitch and roll.
Zapatta cannot because the exhaust hot gas is out of his limbs reach.
The Browing / Daedalus directly directs the exhaust of his arm-turbines and controls his flight.
It is simply the Newton’s “action – reaction law”.
Thanks
Manolis Pattakos
Hello RealDeal (21 July 2018)
You write:
“Sooner or
later some limbs will get into those rotors, they are open and within reach of
people.
You can probably put them higher and add a
pedestal to compensate for imbalance. Still it will take a daredevil hero to
ride it.”
The spinning rotors/ propellers are not in the reach of the pilot (because he first “wears” (tightens on his body) the PORTABLE FLYER and only then he can “crank” the engines).
So the problem is with the people who are within the reach of the spinning propellers.
Small airplanes have the same exactly problem (the spinning propeller is within the reach of “people”).
Helicopters have the same exactly problem (either the main rotor or the tail rotor are within the reach of “people”).
The paramotors / pararapente have the same problem: the spinning propeller is within the reach of “people”.
Having said that, can you spot on why the spinning propellers of the PORTABLE FLYER are more danger than the other spinning propellers?
Thanks
Manolis Pattakos
Hello Flapping Flight (21 July 2018)
You write:
“That's why I think that Oleg's design may win here . It's on the lower limit of minimalism that stil make some sense . ( Mine and Dart tends to be heavier , most efficient in cruise but heavier which will cause stronger downstream and respectively higher probability to tip over the brics)”.
The PORTABLE FLYER is way more minimalistic.
With 20Kg dry weight.
You wear it and walk, jump, run.
Quote from http://www.pattakon.com/GoFly/Submission.html , page 11:
“The pilot actually wears the PORTABLE FLYER like wearing a 45lb travelling
backpack. The PORTABLE FLYER is not just portable, it is “wearable”.
Quote from the Internet:
“Courtesy of U.S. Army Spc.: Soldiers and Marines in Iraq and Afghanistan
routinely carry between 60 and 100 pounds of gear including body armor,
weapons and batteries.”
End of Quotes.
See the attached image / table http://www.pattakon.com/PatTol/JetPacks_vs_Portable_Flyer.png .
In comparison to:
Zapata’s FlyBoard-Air,
and to Browning Daedalus Flying Pack,
and to Mayman JB11 Jetpack,
the PORTABLE FLYER has a few times lower total take-off weight (because for the same range it needs several times less fuel).
Quote from the submission:
“The body, the eyes and the senses of the pilot/rider are available; why
not to use them as the fuselage, the sensors and the control system?
Isn’t this what the birds are doing?”
. . .
“I am the fuselage, and the steering controls are my hands, head
and legs,” Mr Rossy said.
. . .
"You feel very well, you feel the pressure," Rossy says, "you just have to
wake up these senses. Inside an airplane we delegate that to
instruments. So we are not awake with our body."
End of Quote
Don’t believe me.
Believe Yves Rossy, an experienced “cockpit” pilot, and now an “open air” rider (Delta Wing JetPack).
You also write:
“What you thing is the first and second that Oleg will do if size limits suddenly been removed( or if he design it out of this competition for personal use) ?”
The design of the PORTABLE FLYER was ready (and published in the web, in various technical forums) some years before the GoFly contest, and its dimensions were quite close to those used in the submission of the GoFly contest.
So, if the size limits were removed from the GoFly contest, the PORTABLE FLYER would not change dimensions.
The more compact,
and the more lightweight,
and the more overpowered,
the safer the Personal Flying Device, especially at adverse weather conditions.
And the best control is the intuitive (instinctive) control based exclusively on the brain, on the eyes, on the otoliths, on the ears, on the skin, on the body of the pilot.
Listen to what Rossy says about his intuitive control over the Delta Wing JetPack,
listen also to what Mayman says flying for the first time his JB-10: “intuitive nature of flying the JB10 jetpack: like a bike”,
and rethink about the need for “advanced control systems”.
Thanks
Manolis Pattakos
Hello Dennis K. (21 July 2018)
You write:
“ With portable flyer at low speed, the source of the airstream is attached to your head, so the aerodynamic force does not vary as your body rotates, and you'll just keep spinning however you're spinning, until you build up forward/downward speed so the oncoming air (similar to the wind tunnel) acts to slow your rotation, or you give appropriate control inputs.”
The structure of the PORTABLE FLYER is true symmetrical.
Way more symmetrical than the GEN-H-4 (wherein the one propeller is arranged under the other (so the one propeller is fed with air of substantially different speed and direction than the other), which makes necessary the use of an electronically controlled differential to balance the built-in asymmetry).
In the PORTABLE FLYER there are an upper and a lower pair of propellers.
Each pair comprises two intermeshed counter-rotating propellers driven not just by the same engine, but by the same “combustion chamber”: the instant pressures on the crowns of the two opposed pistons of the same OPRE Tilting engine are identical.
The two crankshafts rotate with zero phase difference (i.e. the two opposed pistons arrive simultaneously at their TDC’s).
The two intermeshing propellers driven by the same engine / same combustion chamber are symmetrical.
So, either powered by the one only engine, or powered by both engines, the PORTABLE FLYER is totally symmetrical and has no reason to “rotate” / to spin about the one or the other direction.
Any small deviation from the full symmetry (say because the pose of the body of the pilot is not fully symmetrical) is corrected either by re-vectoring of the thrust force (gimbal joint at the center of the thoracic spine), or by the re-arrangement of the head / limbs of the pilot (aerodynamic control).
Differently speaking:
If you want to spin quickly, you can extend your arms horizontally, with your palms arranged as the blades of a propeller: the fast downwash of the real propellers applies a pair of aerodynamic forces on your palms, which causes an angular acceleration about your long axis; nobody is stopping the spinning until to retract or rearrange you palms.
What I say is that you have strict control over the spinning, from take-off, to hovering, to lanindg.
I.e. on one hand the PORTABLE FLYER has not reason to start spinning about its long axis, on the other hand the pilot has control means to control such spinning.
Differently speaking, the dancer in the wind tunnel https://www.youtube.com/watch?v=-Aw-qjG2zEI (from 2:59 to 3:02) needs not to go to the belly-down position to stop the spinning about her long axis; she exploits the air and the forces applied by the air on her body no matter from where it comes.
Thanks
Manolis Pattakos
Hello Realdeal. (21 July 2018)
So,
we agree that the propellers of the PORTABLE FLYER are not more danger than the existing propellers of small airplanes, helicopters, paragliders, etc.
You also write:
“You should consider your project to have 3-4 support struts instead of just one and employ larger propellers for more efficiency and basically make it somewhat similar to the design below. Now that you basically got the rotor parts right.
Can you explain what you mean by “support struts”?
The landing gearing of the PORTABLE FLYER is built-in: the two legs of the pilot.
As for the larger propellers and their efficiency:
The most fuel efficient “helicopter” so far, is the OSPREY V22 of Bell BOEING, which takes advantage of its higher cruise speeds.
The big rotors are more efficient for the take-off, landing and hovering, but they suffer at high speeds (like above 200mph) and at adverse weather conditions.
Look at the PORTABLE FLYER as a personal OSPREY wherein the body of the pilot is the fuselage, and wherein the ailerons are the head / limbs of the pilot.
As for the “similar design”, just think if it can survive in air gusts of 60mph (the barrel at its top is like a “feather in the wind”).
Thanks
Manolis Pattakos
Hello Flapping Flight (21 July 2018)
You write:
“When speaking about minimalism I think that there is a common sense limit and you passed it.”
I wish I could make it twice as small, and twice as lightweight, as it is now. Because even 44lb is not so light as I want.
Has Zapata, with his FlyBoard-Air, passed “the common sense limit”, too?
Is there another Personal Flying Device that can compare, flying in the air, with Zapata’s?
Isn’t the body of a moto-GP or superbike rider the control system?
The attached photo is the first OPRE Tilting prototype engine:
333 cc,
bore 84mm, stroke 30+30=60mm (same bore to stroke ratio
with BMW's boxer R1200GS of 2013),
weight: 8.5Kp (19lb) without the exhaust pipe and the carburetor
height: 250mm.
The point is to make is lighter.
The limits have always been set by the physical laws (like the conservation of energy) and never by the “common sense”.
Thanks
Manolis Pattakos
Hello RealDeal (21 July 2018)
You write:
“Your rotors are too small for hovering.”
Let’s make a couple of calculation to see if what you claim is true.
CORVAIR XFY-1 POGO:
Maximum take-off weight: 7,370Kg
Propeller / Rotor diameter: 4.88m
Disk area: 18.7m2
Disk loading (Weight to Disk area): 7,370Kg / 18.7m2 = 394Kg/m2
The only way for the XFY-1 to take-off, is to hover.
So it does hover.
PORTABLE FLYER:
Maximum take-off weight: 110Kg
Disk area: 1.3m2
Disk loading: 110Kg / 1.3m2 = 85Kg/m2, i.e. only 22% of the Disk Loading of the XFY-1.
By the way, the Disk Loading of the OSPREY V22 is 102Kg/m2.
Thanks
Manolis Pattakos
Hello Denis. (21 July 2018)
You write:
“What I'm saying is that while it doesn't have any tendency to start spinning, it doesn't have any tendency to stop spinning either. Retracting your palms will only stop accelerating the spin, you'll have to give opposite palm input to stop spinning.”
Exactly.
You also write:
“It's all well and good as long as you don't make any mistakes, but difficult to regain control once lost. The big question is whether it will feel completely natural, or respond so strongly to control inputs that new pilots will get disoriented easily and then give wrong inputs trying to correct it. Once you develop muscle memory for what inputs correct what rotation directions, it should be pretty safe.”
This is what the tethered tests are for: to train the pilot to respond properly, without the risk of a crash.
According Mayman, some 3 hours of tethered tests with the JB-10 Jetpack are OK before taking-off to the open air. And as Mayman says, the intuitive control (bicycle like) is the way.
When a child begins riding a bicycle, the stabilizing wheels prevent the falls.
Quote from http://www.pattakon.com/pattakonFly.htm
“Control
When a child begins riding a bicycle, it
progressively learns how to react properly to the signals from the eyes and the
body (i.e. on how to keep the control).
Just like driving a bicycle, the eyes / body /
brain of the rider / pilot of a Portable Flyer are the sensors and the control
system: the rider soon discovers the way to react properly and to keep the
control. For the Portable Flyer is a true neutral propulsion
unit: neither vibrations, nor reaction
torque, nor gyroscopic rigidity, only a force: a force that can
"instantly" and effortlessly be vectored towards the desirable
direction.
In a Flyer it is better to be used the body of
the rider as the main sensing and controlling equipment (birds like), than
developing and paying and carrying stabilizing and flight management
systems.
The birds, the bats and the bugs fly because
their bodies can provide adequate power for their weight. The power provided by
a man's body is not adequate to lift its weight. “
Thanks
Manolis Pattakos
Hello Rayan Wallace (21 July 2018)
OPPOSED PISTON ENGINES
There are various Opposed Piston engine designs.
Some designs are old, some are recent.
In some designs the same crankshaft drives both opposed pistons, in some others each opposed piston is driven by a different crankshaft, in some others both opposed pistons are driven by both crankshafts.
Some designs have pushing connecting rods, some others have pulling connecting rods providing additional piston dwell at the combustion dead center (more constant volume combustion).
Some are fully symmetrical, with counter-rotating crankshafts and perfect balancing.
Some are compression ignition (Diesels), some are spark ignition.
Some have 4-stroke like lubrication, some use premixed fuel-lubricant.
Some have symmetrical design with asymmetrical timing of the ports.
Etc, etc.
You can read a lot about Opposed Piston engines at:
http://www.pattakon.com/pattakonOPRE.htm
http://www.pattakon.com/pattakonPatOP.htm
http://www.pattakon.com/pattakonTilting.htm
http://www.pattakon.com/pattakonPatAT.htm
http://www.pattakon.com/pattakonFly.htm
Thanks
Manolis Pattakos
Hello Flapping Flight
You write:
“This scheme solve one fundamental problem of piston ICE the bore to stroke ratio.”
. . .
BTW by using variable sinchronization betwin both cranks very elegantly you can achieve variable compression ratio.”
The PORTABLE FLYER comprises two OPRE Tilting engines (OPRE: Opposed piston Pulling Rod Engine) secured to each other to form (with their casings) the personal flying device’s “backbone”.
The one engine drives two counter-rotating propellers arranged above the backbone, the other engine drives two counter-rotating propellers arranged below the backbone.
Each OPRE Tilting engine comprises:
• a casing (actually a strong pipe ~10’’ long and ~5’’ external diameter), with a cylinder liner formed into and along the casing; (securing the casings of the two engines “coaxially”, it is formed the backbone of the PORTABLE FLYER, which is actually an inflexible pipe of ~20’’ long, ~5’’ external diameter).
• a pair of opposed pistons sealing two sides of the same combustion chamber formed at the center of the casing;
• a pair of connecting rods, each connecting rod shaped (at its small end) into a tilting valve that controls the intake / transfer (gif video animation http://www.pattakon.com/tilting/OPRE_Tilting_gif_video.gif); the “reverse” arrangement of the connecting rods (they are loaded in tension during combustion) extends substantially the piston dwell at the combustion dead center (more “constant volume” combustion) and transfers the thrust loads away from the hot/ported cylinder liner area;
• two counter-rotating crankshafts arranged at a small distance (~4’’ crankshaft axis to crankshaft axis) from each other, at zero phase difference from each other;
• a pair of synchronizing gearwheels (at operation they run unloaded).
Each crankshaft, through a toothed belt and a pair of sprockets, drives a propeller at a transmission ratio (the number of the teeth of the sprockets is selected to align the higher rpm of the crankshaft with the lower rpm of the propeller); the one toothed belt is longer than the other toothed belt.
ZERO VIBRATIONS, ZERO GYROSCOPIC RIGIDITY, ZERO REACTION TORQUE:
• The symmetry of the engine, the zero phase difference between the two synchronized and counter-rotating crankshafts, the common combustion chamber (same instant pressure on the piston crowns of the two opposed pistons, same (and opposite) instant torque on the two crankshafts), and the symmetrical load (two counter-rotating symmetrical propellers) rids the saddle (and the pilot) of all kinds and orders of vibrations (zero free inertia forces, zero free inertia moments, zero free inertia torques, and zero combustion vibrations of all kinds). This is an absolute requirement when a powerful high revving engine is to be tightened to the body of a person.
• The reaction torque is also permanently zero: no matter how wide the “throttle” is opened, or how abruptly the “throttle” opens or closes, there is no reaction torque (the only that happens is the increase or the decrease of the thrust force provided by the propellers).
• The symmetry and the counter-rotation of the propellers and of the crankshafts maintains the gyroscopic rigidity of the PORTABLE FLYER zero. Even when only the one engine is running (for instance due to a malfunction of the other engine), the gyroscopic rigidity is zero. Zero gyroscopic rigidity means that the pilot “instantly” and “effortlessly” can vector the engine/propellers (i.e. the thrust force) towards the desirable 4 direction, which is an absolute requirement for a safe, accurate and instantaneous control of the flight.
• Without zero inertia and combustion vibrations, without zero gyroscopic rigidity, and without zero reaction torque at the changes of the “throttle”, the control of the flight becomes slow, inaccurate, unsafe, uncomfortable and exhausting.
Thanks
Manolis Pattakos
Hello Flash Gordon (23 July 2018)
You write:
“NOT to be "worn or put on", with a range that would have a "20 min 20 mile" RESERVE, after a normal flight. All of you have had excellent ideas and comments that fall outside the competition and therefore we should get together and at least discuss the possibilities of pooling some bright ideas for a SAFE, RELIABLE, QUIET, and AFFORDABLE, 2 PLACE PAV.”
“Unfortunately” the PORTABLE FLYER is “wearable” / “worn and put on”.
To be “worn and put on” is not at all easy:
it requires small weight (less than 100lb; the smaller the weight the better),
it requires proper shape (to fit onto pilot’s body),
it requires high (perfect if possible) vibration-free quality,
it requires zero gyroscopic rigidity,
it requires zero reaction-torque, etc, etc.
I used to think that something that can be “worn and put on” can also function as NOT “worn and put on”, while the opposite is from difficult to impossible (a 250lb PAV cannot be wearable, bearable).
The PORTABLE FLYER is a single PLACE PAV. Only for emergency (say during a rescue) the pilot can carry a passenger on his back (the thrust is adequate for two people), but not in a normal travel.
So the PORTABLE FLYER is a single “SEAT” PAV; more correctly is a “no SEAT” PAV because the pilot is the fuselage and needs not a seat to seat on.
While for the “common sense” a seat seams indispensable, if you ask an eagle or a bat or a mosquito, I bet they will disagree.
If “normal flight” means something shorter than 350 miles, then the PORTABLE FLYER has a reverse of more than “20 min 20 mile” at landing.
As for the “AFFORDABLE”,
the PORTABLE FLYER is just two Opposed Piston engines and four propellers, while its control is intuitive / instinctive / built-in / costless (the brain and the body of the pilot).
So it has no reason to be – in mass production – more expensive than 3,000 USD (think how many more costly subsystems a scooter or a motorcycle requires: wheels, suspension, steering, brakes, seat etc).
Differently speaking: see a video of Zapata flying with his FlyBoard-Air and making acrobatics in the air.
This is the future for the PAV’s (Personal Aviation Devises).
This is the state-of-the-art PAV.
The “famous” Martin JetPack is “past”, it is like a “flying tank” as compared to Zapata’s FlyBoard.
The challenge is to improve the “state-of-the-art”, to make better the present champion.
To try to design / make / sell “flying cars” or “flying tanks”. . . is not promising.
Your specifications / limitations exclude me out of your community.
Thanks
Manolis Pattakos
Hello Bryan Wallace. (24 July 2018)
You write:
“@manolis you have a very interesting engine design. The problem is it takes decades and enormous amounts of money to certify an aircraft engine. There is a reason most general aviation aircraft still use Lycoming engines which are WW2 technology.”
“the PORTABLE FLYER is actually its engines.”
(see the image at http://www.pattakon.com/PatTol/Portable_Flyer_Submission_GoFly_page1.png; it is the first page of my submission).
The problem: to make a safe / quiet / compact / VTOL Personal Flying Device capable of flying for a long distance carrying a single person.
The existing “certified” aircraft engines (either old designs (like the Lycoming), or recent designs (like the Rotax 912 S)) have not the required / desirable characteristics.
So new engine designs were necessary, wherein:
the vibration-free-quality (inertia vibrations and combustion vibration) must be near perfect (otherwise a powerful reciprocating piston engine secured on pilot’s body is a torture),
the gyroscopic rigidity (including the spinning propellers) must be zero,
the reaction torque must be zero,
the engine(s) weight must be bearable / manageable,
the simplicity / reliability is basic requirement,
the fuel efficiency must be high,
the emissions must be low,
etc, etc.
FUEL EFFICIENCY AND EMISSION:
Quote from https://newatlas.com/jetpack-aviation-jb11-david-mayman-interview/52944/ (interview of Mayman JB10 / JB11 JetPacks):
“Question:
But the new certification will let you carry more fuel and fly longer?
Answer:
Yeah.
The restriction under Part 103 with the FAA is that you can only carry five gallons of fuel. So that limits our duration. But under the experimental category – and we'll be the first company ever to get an experimental category for a jetpack – you can go unlimited fuel and unlimited speed, and it opens up flight profiles in terms of what you can fly over. You can fly over populated areas – under Part 103 you can't.”
End of Quote.
5 gallons of fuel (15Kg / 32lb of fuel) consumed in 12 minutes or into 20 miles (pretty optimistic estimations, judging from real data of Zapata’s FlyBoard-Air).
Mayman is happy because FAA allows him to carry more than 5 gallons . . .
Mayman’s JB-11 (280,000 USD price) weighs 50Kg (110lb) dry, and 65Kg (143lb) with the typical 5 gallons of fuel. And he wants more fuel for his WEARABLE Device . . .
Seriously now:
The fuel efficiency must be high to reduce the emissions and to reduce the required fuel weight (and cost) for a specific range.
Mazda claims a 20% improved mileage (as compared to their own top fuel efficient SkyActiv-G mass production engines) with their new SkyActiv-X HCCI combustion (it is to be in mass production in 2019); and Toyota recently increased their share in Mazda to benefit from the SkyActiv-X technology. Do see Mazda’s video at https://www.youtube.com/watch?v=a82Wt53gu78
After two centuries of development of the spark ignition reciprocating piston engine, in 2018, Mazda found that the spark ignition engine as we know it today is wrong and can be 30% more efficient.
And it seems that Toyota agrees with Mazda
The OPRE tilting PatBam uses a pure mechanical control over the HCCI combustion; with lean burn and more “constant volume combustion”, the fuel consumption and the emissions drop a lot.
So, it is not only about flying, it is about flying in an affordable and green way.
If it takes decades and enormous amounts of money for the certification of an aircraft engine in the USA, then the USA residents will have to wait following the bureaucracy, while the residents of other countries will fly following the progress (like Zapata in France and the rest Europe).
Thanks
Manolis Pattakos
Hello Mokrern (25 July 2018)
You write:
“you said that this is the future of PAV: Personal Aerial Vehicle, maybe it is the future of PAD (Personal Aviation Devises), this is a device (a gadget with some possible applications) not a real vehicle, it can be considered as a nice device but not the future of Personal Aerial Vehicle (jet powered device cannot be the future, the same for piston engines)”
If the controversy is about the nomenclature / the classification / the naming (PAV or PAD or gadget or . . .), it is OK: call it as you like, just to be able to fly with the speed, acrobatics and grace of Zapata’s FlyBoard-Air and of Yves Rossy’s Delta Wing (both powered by jet turbines).
As written in previous posts:
if during the ceremony (the fly-demonstration / presentation to the media) of the big winner of the GoFly / BOEING contest (reasonably one of the ten winners of the phase I) Zapata and Yves Rossy show up with their “gadgets” / PAV’s / PAD’s making their acrobatics, the ceremony would turn into comedy (nobody could not help laughing).
As for the future of piston engines powering Personal Aerial Vehicles, you can ask Toyota (the maker of the PRIUS) why they increased their share in Mazda when Mazda announced their new SkyActiv-X HCCI technology.
The batteries are not good for aerial vehicles because they are too heavy: they still have several times lower specific energy (energy to weight ratio) as compared to piston engines running on hydrocarbon fuels.
Quote from my submission (page 5 bottom):
“Comparison to a battery powered personal flying device
Considering: 50% BTE,
44lb (20Kg) total net weight of the PORTABLE FLYER,
5 US-gallons regular gasoline fuel (31lb, 14Kg) in the tank and
a 44MJ/Kg (of regular gasoline) “fuel energy content”,
the total weight (without the pilot) is 75lb (34Kg) at take off, and ~45lb, (~20Kg) at landing, and the mechanical energy that can be extracted from the fuel is 315MJ.
A high-tech modern set of batteries (having, say, an energy density of 500Wh/Kg = 1.8MJ/Kg) capable of providing the above calculated 315MJ of energy, weighs 385lb (175kg) at take off (the same at landing).
Besides the batteries, they are required electric motors for the driving of propellers and a frame to hold everything (batteries, electric motors, pilot, etc).
The EHANG184 (at http://www.ehang.com/ehang184/specs/ ) is an indicative example of such a battery powered personal flying device: 260Kg net weight, 100Kg payload, 100Km/h speed, 25 minutes autonomy and ~25miles (40Km) range.
Starting with the same energy content (315MJ), the total take-off weight (including the pilot) of the electric flyer is 2.5 to 3 times higher than that of the PORTABLE FLYER, which means it requires a few times more power to hover and fly (especially when the maximum dimension is limited and the noise penalty is high), which means a many times smaller range.
The many times smaller range is a crucial disadvantage for the usefulness of the personal flying device and for the safety: even if the path (that the personal flying device is to follow) is full of battery recharging stations, to land and take off several times in order to go to a destination where the PORTABLE FLYER goes “non-stop”, is by itself very risky (the safest part of a flight seems to be the cruising). When there are not recharging stations (like when going to an island) the battery personal flyer is useless.”
End of Quote
When numbers get into play, the discussion gets more serious.
If you disagree with the above calculations, please let me know where.
If you agree, then which is the future of personal aerial vehicles: the batteries or the pistons?
Thanks
Manolis Pattakos
Hello Flapping Flight. (25 July 2018)
You write:
“Here a good video on opposed piston engines for those that
are unfamiliar with
https://youtu.be/UF5j1DvC954”
In the original design of Achates Power Opposed Piston engine, there were two side crankshafts, each connected – by multiple connecting rods - to both opposed pistons; the image is from one of their patents:
http://www.pattakon.com/tempman/Achates_Power1.gif
Their first investor: Walmart.
Later they rejected their original design and compromised with the 100-year-old Junkers design and they gained some contracts with the US Army.
Their basic difference from the old Junkers Jumo aero Diesel engines is their fuel delivery system.
In comparison,
the “pulling rod” architecture of the OPRE Opposed piston engine increases the piston dwell at the combustion TDC for some 30% enabling a more “constant volume combustion”,
the crankshafts approach each other (enabling lightweight synchronization gearing),
the thrust loads on the piston skirts are taken away from hot exhaust ports (wherein the scuffing typically starts),
etc.
For more read at http://www.pattakon.com/pattakonOPRE.htm and
http://www.pattakon.com/pattakonOPRE2.htm
Thanks
Manolis Pattakos
Hello Flash Gordon. (25 July 2018)
You write:
“Manolis, with all due respect, I love what Zapata, Rossi, Iron Man, etc... and any and all like items and devices. There are wonderful, creative designs, and should be built but, they are NOT the same as, or comparable to, a skateboard. They are very exciting (POC) Proof Of Concepts and crowd pleasers, flown by some very daring and skilled pilots. But, If you offered these bare bones devices to the "anyone, anywhere" public they become instant killing machines.”
You overestimate the difficulty of controlling a Mayman JB-11 JetPack, or a Zapata FlyBoard-Air JetPack, or Ives Rossy Delta Wing JetPack.
No, they are not killing machines, at least no more than when you enclose the pilot into a cockpit.
If all of them strike on the ground, the result will be the same.
Quote from https://www.digitaltrends.com/cool-tech/jetpack-aviation-jb-10/
“It’s like a Segway, Mayman explains.
If you want to go forward, you just lean forward.
If you want to stop, you just lean back.
It’s incredibly simple.
If you wanted to fly a helicopter, you’d need 150 hours of training — but with this, you can learn everything you need to know in about 3 hours.”
End of Quote
According Mayman’s experience on training “ordinary people” to fly with his JB10 JetPack,
some 3 hours of tethered tests / training is considered adequate before the initial low height free tests above water.
The pilot can fly at small height over the sea (or over a lake) for as long as it takes to get familiar and confident.
Only when the trained pilot feels ready, the pilot can take-off to the sky.
According Mayman, flying with his JB-10 is intuitive and easy: it is as easy and as intuitive as bicycling.
A motorcycle rider is not necessarily safer than a pilot flying with a JB-11: the one has all three dimensions to escape from a collision, the other has from one to none.
Worth to note here:
Zapata’s FlyBoard-Air,
Mayman JB-11,
Browing Flying Pack
and the PORTABLE FLYER
are all capable to continue fly (and to safely land) after any single point failure.
You also write:
“Respectfully, Larry (FLASH) Gordon flashgordonvtol@outlook.com
Co-Founder, President of LoPrest Gordon VTOL
Inc. The "Guardian" 2001.”
Instead of this,
I would prefer to read your complete submission to GoFly / BOEING contest.
Thanks
Manolis Pattakos
Hello Gary Gress. (25 July 2018)
Straight question:
Is it honest that GoFly asks me to first register in Phase II, in order to allow / assign a BOEING volunteer engineer to review my submission in phase I ?
Thanks
Manolis
Hello Flapping Flight (26 July 2018)
You write:
“Longer dwell time for constant volume burning is good for the efficiency but I suppouse that in order to keep the same average piston speed the acceleration /deceleration of the piston will be harder also there are a lot of added moving masse.”
The acceleration / deceleration of the piston remains the same; what changes is that the pulling rod architecture shifts the combustion to the “slow dead center” (the BDC of the conventional design becomes the “combustion dead center”).
The piston mass increases, the connecting rod mass decreases; the reciprocating mass is the piston mass plus ~1/3 of the connecting rod mass.
The long piston reduces the tilting / slapping, which is important.
The Opposed Piston design halves the stroke and the mean piston speed.
The 350cc OPRE Tilting engines of the PORTABLE FLYER utilize 30mm piston stroke (30+30=60mm total stroke) and 86mm bore.
At “quiet take off”, the engines run at 7,000rpm (i.e. at 7m/sec mean piston speed, which is lower than the continuous (for weeks) mean piston speed used in the giant marine engines for reliability and fuel economy), the propellers spin at 2,900rpm (i.e. at 150m/sec tip speed).
At fast “take-off” (wherein the noise is not important) the engines run at 9,000rpm (i.e. at only 9m/sec mean piston speed).
(See the pages 11 and 12 of my submission at http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf )
At such speeds the inertia loads are far lower than the combustion loads.
For instance, at 10,000rpm the peak inertia acceleration on the piston is 2,500g (which means 25,000N (5,500lb) peak inertia force per kilogram (2.2lb) of reciprocating mass).
With 0.5Kg (1.1lb) reciprocating mass, the peak inertia force, at 10,000rpm, is 12,500N (2,750lb).
With 80 bar peak combustion pressure (high compression ratio, near “constant volume combustion”), the peak combustion force is 45,000N (10,000lb), i.e. some 4 times larger than the peak inertia load).
Differently speaking, in order the peak inertia loads to become comparable with the peak combustion loads, the OPRE Tilting engines of the PORTABLE FLYER should rev at 20,000rpm (20m/sec mean piston speed), i.e. twice as fast as the OPRE Tilting is to be used.
You also write:
“In last few years ignition system advanced as
well they developed so called corona discharge ignition where the target is to
ignite much larger volume of the mixture than with traditional spark plugs and
this way to speed up the combustion process so the mixture to burn in more
close to constant volume conditions since the piston travel much less for this
shortened mixture burning period.”
Thanks for the link of the corona discharge ignition.
The corona discharge ignition is better than the conventional ignition systems, however it has its own limitations: if the mixture gets two lean, it can’t burn (after the initial ignition near the spark, the flame fades out and the combustion stops).
A better solution is Mahle’s TJI fast combustion system (used in the Formula 1 cars). See the image at http://www.pattakon.com/tempman/Mahle_TJI.jpg
An even better solution is Mazda’s SkyActiv-X SP-CCI (HCCI)
Quote from the page 11 of my submission:
“the Mercedes F1 engines, using the TJI system of Mahle (fast combustion using a pre-chamber and lean air-fuel mixture inside the main chamber), achieve a more than 50% Brake Thermal Efficiency (BTE), while the Mazda SkyActiv-X SP-CCI (HCCI) engines achieve a 20% higher mileage than the modern high-tech SkyActiv-G gasoline engines of Mazda (which are measured as the most efficient engines worldwide for 2016-2017).”
End of Quote
An explanatory video of the HCCI combustion as compared to the conventional progressive combustion is at https://www.youtube.com/watch?v=H_wkoyPRTMY
For more analysis of Mazda’s SkyActiv-X: https://insidemazda.mazdausa.com/press-release/mazda-next-generation-technology-press-information/
Thanks
Manolis Pattakos
Hello Mokren. (26 July 2018)
If and when the energy density of the batteries gets adequately high, then . . . some other important characteristics of the batteries should be considered.
The energy efficiency of the batteries is significant.
If in order to pass 100 kWh of energy to the propellers, you need to spend 1,000kWh of energy (“well to wheels”, or more correctly: “well to propellers”) then something goes wrong: you work on a 10% “well to propellers” efficiency.
The batteries must be not only lightweight, but also efficient.
For instance, in the Tesla cars they use water cooling to cool the batteries.
Some important questions are:
From where the electric energy comes from?
If it is from thermal power stations burning fossil fuels (which is currently the case in most places of the world), then forget it: the top peak thermal efficiency of the thermal power stations is no more than 50% and then you have to transfer the electric energy to the final consumers, which has its own energy losses.
What are the losses during the charging of the batteries?
I.e. what percentage of the electric energy is really stored into the batteries as chemical energy, and what percentage heats the surrounding?
What percentage of the charge in the battery is lost as the time passes?
A battery fully charged progressively discharges internally.
What is the efficiency during the discharge of the battery?
I.e. what is the percentage of chemical energy that turns into electrical energy, and what percentage heats the surrounding?
What is the efficiency of the systems between the battery and the electric motors that finally drive the propellers?
Mazda claims ~50% brake thermal efficiency (BTE) for their SkyActiv-X HCCI engines when they run at part load (lean to very lean mixtures). I.e. Mazda claims the same thermal efficiency as the thermal power stations. The same (~50% BTE) is claimed by Mercedes for their Formula-1 piston engines running on lean mixture with the Mahle TJI system for fast-combustion.
The OPRE Tilting PatBam HCCI of the PORTABLE FLYER engines have have the characteristics to run at similar BTE (on lean and very lean mixtures).
In the PORTABLE FLYER the only additional energy loss is the transmission from the crankshafts to the propellers (a toothed belt on two sprockets); and a toothed belt is one of the most efficient, lightweight, reliable transmissions (final transmission of several motorcycles).
All these make the “well to propellers” energy efficiency much higher than the “well to propellers” energy efficiency of the pure electric Personal Flying Devices.
And if the several times lower power density of the batteries is taken into account . . .
By the way: GoFly / BOEING contest gives zero points for the overall energy efficiency and for the emissions (CO2 footprint) . . .
Thanks
Manolis Pattakos
Hello Flash Gordon. (26 July 2018)
Being a friend of Roy Lopresti, and as a teammate of Sergio Sikorsky (son of Igor Sirkosky) is impressive experience.
I am jealous.
Thanks for sharing.
Let’s suppose that, somehow, we exclude the untrained people and the drunk people from flying with the PORTABLE FLYER.
What other safety issues do you see?
Your friend Roy Lopresti was an Air Forces test engineer evaluating the POGO.
The PORTABLE FLYER can be regarded as a scaled twin POGO (XFY-1) wherein the pilot is the fuselage, and wherein besides the aerodynamic flaps (the limbs of the pilot, in our case), the weight shift control is also available.
According theory (we did not yet made / fly one) the PORTABLE FLYER appears combining the characteristic of several successful Flying Devices.
What are the weak points you see?
Quote from my submission:
“TETHERED TESTS AND TRAINING
The top end of the hollowed pipes can be used for the tethered tests of the PORTABLE FLYER and for the initial training of the pilot (the PORTABLE FLYER can be hanged from a roof (or from a tree branch etc) by ropes tighten on the top ends of the hollowed pipes).”
End of Quote
If the tethered tests are easy and cheap to perform, and if the instructions are complete on “how to”, then the potential pilots can train themselves safely for as long as they like.
Then, they can make several hundreds – or thousands - of miles flying at 2m over the sea until to fill confident and ready.
Imagine some friends wearing PORTABLE FLYERS and flying 3m (10ft) over the sea from Crete to Icaria (as Daedalus with his son Icarus did, according the myth).
It is a distance of some 200miles (300Km).
The wise Daedalus was flying at low height, safely.
The enthusiast but imbruted Icarus made the mistake to fly high and paid the price.
Thanks
Manolis Pattakos
Hello all. (27 July 2018)
As it appears from his replies,
Gary has signed lots of documents (i.e. agreements / contracts between Gary and GoFly / Herox) without understanding their consequences.
And for his own reasons, Gary defends his choice.
I don’t know how Gary evaluates his work,
but some contestants are not willing to give, for free, any percentage (equity) of their work and of their intellectual property to anyone . . .
It is more than economics. It is a man’s dignity. It is called decency.
This is why BOEING (which is involved as the big sponsor) should come and take over the contest.
The guys behind GoFly / Herox destroy BOEING’s reputation and legacy.
By the way,
except Gary Gress, is there someone else who registered in Phase II and who does understand what he has signed?
Thanks
Manolis Pattakos
Hello Flash Gordon. (27 July 2018)
The following GIF animation:
http://www.pattakon.com/PatTol/POGO_FLYER.gif
for a 2-seater VTOl has been added at the web page http://www.pattakon.com/pattakonPatTol.htm
Three legs with aileron, instead of the four legs of
the POGO-XFY-1,
two pairs of contra-rotating propellers instead
of the one of the POGO,
vectored thrust instead of fixed thrust
direction of the POGO.
A little more than a slice of an airplane wing, with two doors / windows (the transparent blue parts) at the sides.
A foam material with recessions to accept the pilot and the passenger backs, on the “ceiling” of the wing, safety belts etc.
Thanks
Manolis Pattakos
Hello all. (28 July 2018)
To the administrator of the GoFly / Herox forum:
Initially there was not the option to edit anything in a post (see my first post in the “20 MINUTES or 20 MILES” discussion 4.5 months ago: in order to delete some text appearing twice, I had to post a new post).
Recently it was added the “Edit” option, which is good but only when proper limitations are set.
In the typical Internet Forums, the “Edit” option lapses a quarter or half an hour after the first appearance of the post.
In this Forum, the “Edit” is unlimited. You can edit anything you posted, no matter it has already been answered by others.
A minute ago I made a test:
I opened the first post in the “20 MINUTES or 20 MILES” thread (it was posted March 15, 2018, i.e. 4.5 months ago) and I pressed the “Edit”.
Yes, I am allowed to modify a 4.5 months old post, i.e. a post to which several of the contestants, and Paul Mussile of GoFly Herox, have already replied.
Please do change the “Edit” parameters appropriately.
Put a reasonable time limit for editing.
Or cancel the “Edit” option immediately after another forum member posts in the same discussion.
It is supposed it is a discussion: and if you change the questions after the other guy has answered . . .
Just think what the future reader would think reading a discussion wherein the answers have been posted before the “appearing” questions.
Unless the unlimited “Edit” is on purpose: another innovation of GoFly on how to destroy an Internet discussion.
But I doubt. So just correct the “Edit” limitations.
To Gary Gress / Littlefly
Please do restore the original posts of yours.
My replies were based on your original posts; not to the “corrected” “modified” ones now “appearing” as original.
To “change your original “questions” after the other guy has replied is not good, at all.
By the way, do you know that your original posts exist in the mail boxes of all forum members, who can check out and compare?
Thanks
Manolis
Hello Flapping Flight (28 July 2018)
Nice video.
Among others, it shows (at 1:12) the EJ-1, the world’s first electric JetPack.
Quote from http://evtol.news/aircraft/electric-jet-ej-1/
The EJ-1 was a submission for Boeing’s GoFly prize, which built off of 11 years of development by Electric Jet Aircraft on a gas-powered VTOL. The jetpack has a base weight of 69 pounds (31 kg) and can lift a person for 2-14 minutes depending on their weight. It is a hybrid system, as roll is controlled and balanced by a computer, but forward, reverse, and yaw maneuvers are manually controlled. The EJ-1 comes in a quick-build kit, and costs $19,995.00
https://i0.wp.com/evtol.news/wp-content/uploads/2018/07/jetpack-1.png
Construction Specifications:
Weight 69 lb / 31.3 kg
Height 43 in / 1.09 m
Length 46 in / 1.17 m
Width overall 99 in / 2.51 m
Duct Materials Carbon Fiber
Propeller Materials CF over wood core
Frame Materials Aluminum and Titanium
Batteries 2x 96V LiPo
Performance Specifications:
Maximum Thrust 394 lbs / 178.7 kg
Maximum Payload 300 lbs / 136.1 kg
Average Flight Time 2 minutes
Maximum Flight TIme 14 minutes
Estimated Top Speed 39.1 kts / 72.4 km/h
Noise Level at 50 feet <70 dB
End of Quote
Quote from https://electricjetaircraft.com/
Control is a hybrid system, with roll controlled and balanced by computer but forward, reverse and yaw maneuvers effected manually with an intuitive flight control system.
End of quote
Questions:
Is there a video of the EJ-1 flying?
Is the 69lb weight for what flight duration?
What costs the 14 minutes duration battery pack?
What is the meaning of the “roll” control? Rotation about which axis?
Since they had (or still have) a submission to GoFly, why they haven’t yet show up and present their device?
PS.
The two ducts of the EJ-1 have some 1.5m2 area (frontal view) and are arranged more than 5 feet above the ground.
What happens at a wind gust?
Thanks
Manolis Pattakos
Hello Flash Gordon (28 July 2018)
You write:
“By the way what happens when there's water in the fuel?”
?
You can, as in the Diesel trucks and cars, use a filter to separate the water from the fuel.
You also write:
“It looks like your pilot/passenger are face down and butt up and looking thru the wing base. Do you prefer that?”
At take-off and landing they are standing upright.
At cruising they are looking forwards and downwards.
Yes, this is what I prefer.
You also write:
“When you are rich and famous, go spend the 20yrs. and $400 million min.”
Come on.
I doubt that Rotax that designed, manufactures and sells their 912 S (a boxer 4-cylinder air/liquid cooled “certified for aviation” engine) has ever dream of $400 million.
The Belgian ULPower produces a range of direct drive air-cooled horizontally-opposed engines for airplanes. It is a small specialized company. Nothing to do with millions of dollars. Here is one of their four cylinder engines (they hav e six cylinder boxers, too):
https://en.wikipedia.org/wiki/ULPower_Aero_Engines#/media/File:UL350iS.jpg
If you start with:
“nothing can be done”,
one is sure:
“nothing will be done”.
You also write:
“ I did not see the projected bhp. of the engine, what is it?”
You should read my submission (at http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf ) which is open to everybody and replies to your question:
Quote from my submission:
“FLYING AND CONTROL
Quiet take-off Limiting the tip speed (of the 39’’ diameter propeller) at only 150m/sec (45% of sound velocity) for “quiet” take off, the resulting propeller rpm is 2,900rpm.
With 28’’ pitch and 3 blades per propeller, the static thrust at 2,900rpm is calculated (with the http://www.godolloairport.hu/calc/strc_eng/index.htm propeller thrust calculator) at ~75lb (~35Kp, 350N), while the power absorbed by each propeller is calculated at ~15bhp.
At the “quiet” take off, the total upwards thrust is 4*75lb=300lb (136Kp, 1360N); with a total weight of 250lb (114Kg, 1140N) this means ~0.3g upwards acceleration; the required power per engine is 2*15bhp=30bhp.
With 2.4:1 “crankshaft to propeller” reduction ratio, the 2,900rpm of the propellers at the above “quiet” take-off, translates into 7,000rpm for the engines.
In order a 21.5ci (350cc) 2-stroke engine to provide 30bhp at 7,000rpm, it needs to make 22 lb*ft (30mN) of torque at 7,000rpm (this is 86mN/lt specific torque, which is easily attainable even for naturally aspirating 4-stroke engines; i.e. the engines run at partial load at take-off: the low tip speed, the partial load with lean burn and the lightweight is the recipe for low noise).
After the take off, the engine rpm (and the propeller rpm) can increase to enable a high cruise speed (above 100mph (160Km/h)).
The small tip speed keeps the noise low.
Top Speed At top speed (~100kts, 185Km/h) the propellers rev at 4,350rpm (propeller tip 12 speed 2/3 of the sound velocity), and the engines are running at 10,500rpm (i.e. 10.5m/sec mean piston speed, still low for improved long term reliability).
SAFETY
In case of malfunction of the one engine, or in case one propeller hits an obstacle and falls apart, or in case a transmission tooth belt is broken, or . . ., the “healthy” engine-propellers-set is sufficient for a safe landing.
With the one only engine running at 9,000rpm (mean piston speed: 9m/sec) and driving its two 3-blade 39’’ diameter / 28’’ pitch propellers at 3750rpm (2.4:1 reduction): the total thrust force is calculated at 250lb (115Kp), the tip speed is 195m/sec (57% of the sound velocity), the power required by the running engine is 65bhp (which means: 36.8 lb*ft (50mN) of torque from 21.5ci (350cc) capacity, i.e. 142mN/lt specific torque, which is attainable by a good 2-stroke: the 2-stroke Rotax 850 ETEC provides more than 20% more specific torque (175mN/lt).
Fast take-off (at emergency, or from distant / unpopulated areas etc)
With both engines running at 9,000rpm, the upwards acceleration at a “fast take off” is more than 1g (10m/sec^2); it is like “falling towards the sky”. Alternatively: the PORTABLE FLYER can carry two persons (the pilot and a passenger); in this case at a malfunction of the one propulsion unit, the emergency landing is not possible without opening the parachutes.”
End of Quote
Thanks
Manolis Pattakos
Hello Flapping Flight (28 July 2018)
The Mahle TJI is patented and quite recent.
Mazda claims the same for their SkyActiv-X (not G or D, the X).
While the conventional HCCI needs high compression ratios (even higher than 20:1, Hundai tried with 18:1 and then they abandoned their project due to the extreme pressures at some operational conditions) the SkyActiv-X uses a 16:1 compression ratio which keeps the combustion pressure in the cylinder from getting extreme.
The success of Mazda is not on achieving to run on HCCI (homogeneous charge compression ignition) at a narrow band of revs and loads.
The success of Mazda with their SkyActiv-X is that they achieve to control the HCCI combustion and to extend the HCCI combustion at almost all conditions (except at very high rpm)
See the following two images to understand what I mean:
and then see the basic “control” Mazda uses:
For more: do read Mazda’s article at https://insidemazda.mazdausa.com/press-release/mazda-next-generation-technology-press-information/ and see the explanatory video wherein an engineer of Mazda explains the SkyActiv-X at https://www.youtube.com/watch?v=a82Wt53gu78
All (Mercedes, GM, Hundai, Honda etc) tried,
but Mazda succeeded to solve the problem: the journalists, around the world have already test – on the roads – the new SkyActiv-X prototype engines of Mazda.
And Toyota, increasing their share in Mazda, becomes a winner as well.
PS.
Did you read my post to Mokren about the “wheel to propellers” efficiency?
This is the most important figure in order to judge the electric cars, the electric airplanes etc against the piston powered ones.
The ecologists need to listen and understand what Mazda says with the term “well to wheels” efficiency, because Mazda speaks sense.
Thanks
Manolis Pattakos
Hello Flapping Flight. (29 July 2018)
You write:
“@manolis
will not going to argue more on ICE s , today is
very modern to claim that everithing starts with you and your own invention but
in the most of the cases it is just brushed some old idea which realization
became possible because advance in the materials or the computer controls
technologies ,etc. Mazda supported Wankels for decades but as you know they
aren't widely used today what I mean is that even the big companyes make
mistakes and sometimes this mistakes are as big as the companyes that make
them.And yes the ICEs approach slowly their sunset similar to the steam engines
many years ago . A lot of Shell gas stations in US closing the doors and in the
same time Shell and BP coming in the electric fast charging business what this
is speaking to you?
About well to wheels efficiency - what about if
there isn't well at all? Even at least few pure solar planes are tested
succesfuly already, In Germany some small company make pure solar cars (
usually the average person drive around 1/2 hrs to the work place and then all
the day the car stay on the parking lot under the sun rays ). Sun , wind , sea
waves etc electric energy sources take more and more part of the whole energy
production and increase everyday .Electric energy is much easier to distribute
than any other form of energy and the electric grid exists already .Many of the
fast charging stations are combined with solar panels arrays and buffering
batteries .The solar panels prices are less than 1$ per 1 W and will continue
to decrease . All components of the electric propulsion system (motors,
controlers and batteries) efficiencies are well over 90% !
Some of hybrid and pure electric cars are able
to power your home during electric shortages periods .
In England even project about using the pluged
in the electric grid electric cars as grid load equilazer is going( the energy
is pulled out of the car batteries during pick hours and the cars are recharged
during low grid load hours. etc we can continue all the day :) The new Wave is
here already :)”
So,
let’s forget the OPRE Tilting and the PORTABLE FLYER and let’s compare the battery with the internal combustion engines as propulsion units for Personal Flying Devices .
While the NSU bankrupted because of their unreliable Wankel rotary engine cars, the Mazda made profit and, more importantly, earned high reputation among the engine makers.
Their long and serious intervention with the Wankel Rotary engine offered to Mazda the opportunity to better understand the combustion: because Mazda had two different platforms to work on, to test and to develop: their reciprocating piston engines, and their rotary Wankel engines (the other engine makers had only reciprocating piston engines).
Mazda proved wise to phase out, in 2012, their Wankel Rotary engines / cars while there was still a high demand for them in the market.
The Wankel rotary appears as the perfect engine, geometrically / theoretically speaking.
But in practice it had, and still has, serious weaknesses.
The reciprocating engines proved better for the propulsion of cars, tracks, motorcycles, scooters etc, etc.
Nobody knows the future.
So, let’s talk for the present, for today.
Let’s make a simple calculation / comparison between an electric Personal Flying Device and a Wankel Powered Personal Flying Device.
The “BATTERY TECHNOLOGY” discussion about existing (available in the market) batteries shows that a power density of 250wh/Kg is barely attainable.
According the specifications of the AIE 225CS Wankel rotary (at https://www.aieuk.com/225cs-40bhp-wankel-rotary-engine/ ), it weighs 10Kg and it makes 40BHP (30kW) with a minimum specific fuel consumption of 310gr/kWh (which means ~25% Break Thermal Efficiency).
To be deep in the safe side, let’s take as 16Kg the weight and as 400gr/kWh the specific fuel consumption (20% BTE) for the above Wankel Rotary.
Fuel consumption per hour: 30kW*400gr/kWh=12Kg/h
For 2 hours flight duration it requires 24Kg of fuel, which means a total weight of 16+24=40Kg (engine and fuel).
The weight of a 250wh/Kg battery that provides the same amount of energy (30kW*2h=60kWh) is: (60,000wh)/(250wh/Kg)=240Kg
The weight ratio of the two power sources (battery and Wankel), at a first approach, is 240/40=6, i.e. a high-tech modern expensive battery appears 6 times heavier than the above Wankel Rotary power unit (the fuel included).
If it was about powering a car, the 200Kg additional weight could be accepted.
But for a flying device, the 200Kg additional weight of the battery is a BIG problem because you have to lift it to the air, which means you need a few times more power, which means you will run out of energy substantially sooner than the 2 hours the fuel of the Wankel rotary is for.
Let’s suppose here that the rest flying device (transmission, cables, electric motors, propellers, frame, pilot) weighs 110Kg in both cases.
The total weight is 150Kg in the one case, and 350Kg in the other case.
To lift in the air a 350/150=2.3 times heavier Personal Flying Device it requires (at a simpleminded first approach (in practice things are worse)) 2.3 times more power, which means the energy will last 2.3 times less, i.e. the 2 hours flight duration of the Wankel flying device will reduce to 52 minutes flight duration for the battery flying device.
In order to achieve the 2 hours flight duration, you have to increase the size (i.e. the weight) of the battery pack.
Let’s see what happens as more batteries are added:
With two batteries (480Kg battery weight, giving a total weight of 590Kg) the power required – relative to the Wankel flying device – gets ~4 times bigger, which means it can achieve ~1 hour flight duration.
With three batteries (720Kg battery weight, giving a total weight of 830Kg) the power required is 5.5 times higher, which gives a 65 minutes flight duration instead of the 120 minutes of the Wankel Flying Device.
With 10 batteries (2,400Kg battery weight, giving a 2,510Kg total weight) the power required is 160 times larger, which gives a flight duration of 71 minutes instead of the 120 minutes flight duration of the Wankel Flying Device.
With 100 batteries (24,000Kg battery weight, giving a 24,110Kg total weight) the duration is almost 75 minutes.
With 1000 batteries, the flight duration goes to 75minutes.
All the assumptions favor the electric Personal Flying Device (unless the 24,000Kg batteries can be secured on a 110Kg frame, or can be lifted to the air by the same propellers that lift 150Kg.
As you see, the small specific energy of the existing batteries puts strong limitations when we talk for useful aviation vehicles, especially for those hovering.
Next year, or after 10, or after 50 years, the energy density of the batteries may increase a lot.
But till then they are far worse than the combustion engines for useful flying devices (i.e. devices having a decent range and capable to stay in the air for long).
It is not only the Wankel.
A power set comprising a typical paramotor 2-stroke engine running at 7,000rpm and driving, through a multi-V belt and pulleys, a 60” propeller at 2,000rpm, weighs some 20Kg, has a specific consumption lower than 350gr/kWh, provides a static thrust of more than 100Kg and is cheap, cheaper than a high-tech battery.
So, it is not only the PORTABLE FLYER that is better than the electric Personal Flying Devices.
It is the batteries that are still too heavy and not good for aviation devices.
Thanks
Manolis Pattakos
Hello Milo (July 29 2018)
I dont understand your obsession with such a simple clearly defined rule.
Either give “earth and water” (i.e. surrender) to GoFly / Herox, or forget BOEING’s million dollar prize.
The first sentence is your own words:
when I was trying to explain that GoFly brutally breaks their most fundamental rule: “a VTOL personal flying device capable of flying 20 miles while carrying a single person.”
Quote from your answer, 22 March 2018, in the “20 MINUTES or 20 MILES” thread.
@man pat
I dont understand your obsession with such a
simple clearly defined rule. If it is not in the rule book it doesn't matter.
Do you think racing teams claim exceptions because of a broad statement made
for marketing?
Thanks
Manolis Pattakos
Hello Flapping Flight (29 July 2018)
You write:
“@manolis
The difference betwin good experienced engeneer and not so good and
inexperienced is that the first one no need to test ( physically or virtually)
all the possibilities in order to chose the best one! Also the second approach
costs a lot of time and money . There is a good American proverb apropriate for
the case "don't work hard,work smart"
Yes the batteries still heavy but this improves with every other day ( much
slowly that we desire but improves) . Recharging the batteries ( on electric
cars) for 100miles range cost few $ ,usually less than cost of gallon of
gasoline , the "fuel "efficiency of electric cars is over 100miles
per gallon if compare as money equivalent, if you recharge from your own solar
array the cost will be times lower. They are maintenance free ( this virtually
ofcoarse ) if compare to ICE cars. They are much more reliable . Most of the
people even no need for their usual everyday commute today available ranges
.Someone was calculated the average American commute range as something about
38 miles daily ( if recal correctly ofcoarse but it is somewhere close for sure
).
The question is why than you need 300 miles range for just in case few times
per month to cover longer than usual everyday traveled distances? The
additional capacity of the battery is just dead weight in everyday commute .It
cost you execive energy consumption to move it around( since it's heavy) also
it cost a lot of money and in the same time deteriorate with the time ? That is
why I think that the hybrid scheme plug in one ( with pure electric range of
50-60 miles)is the best choice until the batteries mature.
For the flying devices since the load is relatively constant turbo shaft -
electric hybrids are the best choice . Both engines are much more reliable than
any piston or Wankel ICE. If heat exchanger exost/intake used ( it makes the
engine heavyer )the efficiency become acceptable even in low end scale and in
close to the ground enviroment.
Also if the PAV is designed as two seater pure electric than if you want longer
range you can use additional battery "range extender " on the place
of the second passenger.
Also not on last place the environmental issues ,with every other year our home
the planet Earth become les and les comfortable place to live on! Is it result
of human activities or not is a long dispute but what we can do is at least to
minimize the human impact on the nature!”
Sorry, but I can’t follow.
Are we talking for the future, for the past or for now?
Is there available, in the market, a “turbo shaft – electric hybrid” that fits with Personal Flying Devices?
Price?
Weight?
Fuel efficiency?
Technical specifications?
If you talk about the Jaguar C-X75 project with the micro gas-turbines etc, forget it. It is past. It was cancelled before its launch.
More at https://en.wikipedia.org/wiki/Jaguar_C-X75 wherefrom the following quote:
“In May 2011 Jaguar announced a limited production of the C-X75 from 2013 to 2015, with a downsized, forced induction petrol engine combined with electric motors instead of the micro gas turbines in the concept car. The price of the plug-in hybrid sports car was estimated between GB£700,000 – GB£900,000 (US$1.15 – US$1.48 million) “
End of quote.
Are the electric cars, and their batteries, so good?
Then what the INCENTIVE is for?
Why the buyers are so reluctant?
ELECTRIC CARS INCENTIVE IN GERMANY
“Germany in 2016 launched the incentive scheme worth about 1 billion euros and partly financed by the German car industry to boost electric-car usage but it includes a baseline to exempt luxury models.
BAFA unexpectedly took Tesla's vehicles off the list in December, saying customers could not order the Model S base version without extra features that pushed the car above the price limit.
Tesla denied at the time that the no-frills version was not available and said on Thursday a model was always available below the cut-off price.
BAFA said it was nonetheless reviewing previously approved applications for subsidies, which could mean that buyers may be asked to repay subsidies they have already received.
BAFA has received a total of 1,275 applications for subsidies of Tesla purchases, according to its website. It was not immediately clear how many of those were approved before the agency removed Tesla from its list in December.
Under the subsidy scheme, buyers get 4,000 euros off their all-electric vehicle purchase and 3,000 euros off plug-in hybrids.”
End of Quote
The above quote was published three months ago.
The buyers of conventional cars finance the electric cars.
You write:
“The difference betwin good experienced engeneer and not so good and inexperienced . . .“
Come on.
Here we talk for a specific problem: for Personal Flying Devices.
I am trying to figure out some advantages of an electric Personal Flying Device as compared to a Personal Flying Device powered by a reciprocating piston engine or by a Wankel Rotary engine.
So far the electric seems the expensive one, the heavy one, the one having quite shorter flight duration, the one having quite smaller range, the one with the slower accelerations / decelerations (maneuverability), etc.
To put it differently:
Suppose you are the seller and I am a potential buyer; what are your arguments in order to persuade me to pick the electric one?
I can’t think a good argument.
For instance, take the EJ-1, the first electric JetPack, that, according its specifications, has an “average” flight duration of 2 minutes (I suppose this duration is for the “basic”, the “cheap” (only 20,000 USD) version).
With 2 minutes flight duration, imagine the range.
Anyway, suppose it takes off and lands a mile (or two) away.
Then what?
You have to transfer it back to home to recharge?
Or some support team will follow it with a charger to recharge the batteries?
The EJ-1 (more at https://electricjetaircraft.com/ ) shows the present reality.
When numbers and calculations get into the discussion, the discussion gets more serious.
**********************
PS / Edit:
You write:
“The question is why than you need 300 miles range for just in case few times per month to cover longer than usual everyday traveled distances?”
The (optimistic) calculations of my last post talk for a ~50 minutes flight duration with a 240Kg battery PACK: nothing to do with 300 miles range, not even with 100 miles range (which means a radius of less than 50 miles, unless at the destination you can always find electric current to recharge).
So the question is how this significant disadvantage / limitation (the small range), is presented as an “advantage” of the electric Personal Flying Devices.
Quote from my submission:
“The long range increases the reachable destinations squared (if with 20 miles range the accessible destinations are X, with 200 miles range the accessible destinations are X*(200/20)^2=X*100, i.e. 100 times more).”
Thanks
Manolis Pattakos
Hello Flash Gordon. (June 30 2018)
What is the core, the fundamental idea behind the “hybrid cars”?
The spark ignition reciprocating piston engine had, and still has, a BSFC (brake specific fuel consumption, given in gr of fuel consumed per kWh of mechanical energy produced) that significantly varies with the load.
When the load is light / partial, the BSFC increases or multiplies.
If the engine could operate only around its minimum BSFC point (load vs rpm plot), the mileage would maximize.
A typical 200bhp (at, say, 5,000rpm) medium car engine works, most of the time, at light load.
For instance, cruising on a level highway at 60mph (96Km/h) and, say, 2,000rpm, it is required no more than 15bhp, which is less than 20% load.
Following the slow traffic in a town, the required power is even lower and the engine runs at even lighter loads.
What the Hybrid cars do?
They put the engine to operate at heavy load (i.e. at low BSFC), they store the excessive amount of the mechanical energy into batteries and when the batteries are near fully charged the internal combustion engine is switched off and the car runs pure electric until the batteries are nearly discharged; then the engine is again switched on, and so on.
The penalty is the additional cost (batteries, electric generator, electric motor, cabling, control), the additional weight and the added complication.
What a hybrid system would offer to a Flying Device?
To make the problem more specific,
take the PORTABLE FLYER or the 2-seater POGO-FLYER (animation at http://www.pattakon.com/PatTol/POGO_FLYER.gif ) and replace the one OPRE Tilting Internal Combustion Engine by:
a pair of electric generators (each driven by a crankshaft of the other OPRE engine),
a heavy battery,
and a pair of electric motors, each driving its own propeller.
What makes you think that the electric / hybrid PORTABLE FLYER or POGO-FLYER is safer, or faster, or it can achieve a longer range or flight duration as compared to the original design?
On the contrary, the original version is cheaper and simpler (so more reliable), and more lightweight (the complete engine weighs some 8Kg / 18lb, several times lower than the weight of any battery / electric motor/generator set) and more efficient.
WHY MORE EFFICIENT?
Because each time you transform the energy (from mechanical, to electrical (by electric generators), to chemical (in the battery), back to electrical (in the battery), and back to mechanical) there is an energy loss.
Put 95% efficiency (too optimistic) in each one of the above energy transformations, and you have an indication of the overall energy loss: some 20% of the initial mechanical energy is lost as heat.
So,
if the electric hybrid POGO-FLYER could achieve a 400 – 600 miles range, the pure mechanical version (as in the animation) could achieve a 500 – 700 miles range.
I used nothing more than common sense and simple maths.
By the way,
Toyota has the best hybrid in the world (the PRIUS).
Toyota recently increased their share in Mazda to take part in the SkyActiv-X technology, which actually beats the hybrid technology because at the light / partial loads the engine runs more efficient than at full loads like the Diesels (but without the emissions of the Diesels).
Quote from my submission:
“as the load of the lean-burn throttle-less HCCI engine decreases, its BTE remains high (as in the Mazda SkyActiv-X HCCI and in the conventional Diesel engines); the opposite is the case for the stoichiometric throttled spark ignition gasoline engines wherein the lighter the load, the lower the BTE.
. . .
(the difference of the OPRE Tilting 2-Stage-Ignition HCCI from Mazda’s SPCCI is the control over the HCCI combustion: in the one case (Mazda) the first stage of the 2-stage ignition is controlled by a spark plug that generates/controls an expanding fire-ball in a united combustion chamber, in the other case (OPRE Tilting 2-Stage-Ignition) the first stage of the 2-stage combustion is achieved by over-compression in the pre-chamber).
”
Youtube video: https://youtu.be/jgIDbHOosFE
Thanks
Manolis Pattakos
Hello Flapping Flight (30 July 2018)
You write:
“@manolis
BTW looks like Prius need about 20hp on 60mph
horizontal and it is extrimly aerodinamically optimized
Most of the more conventional cars needs 40 hp
on the same exersize.”
No, you are wrong.
It is simple to calculate why.
It is, also, simple to check in practice the calculations.
CALCULATIONS
Maximum speed of a medium size car having 80bhp peak power: 170+ Km/h (106mph).
(the above data are for the white car, at left (attached image), used for the first Pattakon VVA project; more at http://www.pattakon.com/pattakonRod.htm )
From the 80bhp of the engine power output, some 10 are lost in the transmission (clutch, gearbox, differential, power shafts, CVJ joints).
So, they remain 70bhp to propel (to push) the car.
The aerodynamic resistance increases with speed square, while the power consumed for the aerodynamic resistance increases with speed cube.
The rolling resistance is constant, while the power consumed for the rolling resistance increases proportionally with speed.
If at 106mph the aerodynamic resistance consumes 62bhp (with the rest 8bhp consumed by the rolling resistance), then at 60mph the aerodynamic resistance consumes 70*(60/106)^3=11bhp, while the rolling resistance consumes (60/106)*8=5bhp.
Total resistance at 60mph: 16bhp.
Let’s check it the opposite way:
If at 60mph the total resistance (aerodynamic and rolling) consumes 40bhp (say, 35bhp for aerodynamic and 5bhp for rolling), then at 106Km/h the required power would be:
35*(106/60)^3 + 5*(106/60) = 192bhp + 8bhp = 200bhp. However the specific engine makes only 80 on its crankshaft.
Let’s see it from one more viewpoint:
If at constant 60mph speed the car consumes – on a flat road – 40bhp of power (say, 35 for the aerodynamic resistance and 5 for the rolling resistance), then with 70bhp net “wheel” power (80bhp on the engine crankshaft) the final speed of the car cannot be more than 74mph / 120Km/h:
35*(74/60)^3 + 5*(74/60) = 66 + 6 = 72bhp
The final speed of the car was tested on the road and is correct: above 106mph / 170Km/h, nothing to do with 120Km/h.
IN PRACTICE
In practice it is quite easy to confirm with your own car the above.
In a long empty road having constant and known downhill slop, say 5%, leave your car to roll freely (engine disengaged) and see the final speed it reaches.
If you know the total weight of the car (driver / passengers included) then you have all the data required to calculate the overall power consumed (aerodynamic and rolling).
For instance, if the final speed is 75mph (120Km/h 33.3m/sec)) and the total weight is 12,000N (2,650lb), then the power consumed at 75mph is:
12,000N * 33.3m/sec * 0.05 = 20kW = 27bhp
YOUR TURBINE HYBRID (in several posts).
Have you any idea about the BSFC of the turbines proposed as prime movers for your hybrid system?
Did you read my last post about the losses when you transform the mechanical energy to electrical, to chemical, back to electrical and back to mechanical?
Wouldn’t it be better to use a second turbine to replace the battery and the rest electric system? After all, the output of the turbine is the input of the electric system, so you just increase the overall losses.
The turbines used by Yves Rossi, Zapata, Mayman and Browning, offer an overall fuel efficiency (at least in the way they are used) which is worse than bad.
By the way, suppose you take off quietly (i.e. pure electrically) and when you ascent at 200m height you switch on the turbine(s). Would the noise be affordable for people and animals on the ground?
NOISE REDUCTION IN THE PORTABLE FLYER
Quote from http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf :
At the “quiet” take off, the total upwards thrust is 4*75lb=300lb (136Kp, 1360N); with a total weight of 250lb (114Kg, 1140N) this means ~0.3g upwards acceleration; the required power per engine is 2*15bhp=30bhp.
With 2.4:1 “crankshaft to propeller” reduction ratio, the 2,900rpm of the propellers at the above “quiet” take-off, translates into 7,000rpm for the engines. In order a 21.5ci (350cc) 2-stroke engine to provide 30bhp at 7,000rpm, it needs to make 22 lb*ft (30mN) of torque at 7,000rpm (this is 86mN/lt specific torque, which is easily attainable even for naturally aspirating 4-stroke engines; i.e. the engines run at partial load at take-off: the low tip speed, the partial load with lean burn and the lightweight is the recipe for low noise).
. . .
Every oz, every gram of additional weight requires additional power and additional fuel and makes the control of the flight more difficult, the landing more risky and dangerous, and the noise louder
. . .
The estimation for the noise level is justified by:
the low tip speed of the propellers (~45% of the sound velocity),
the silent tilting valves that eliminate the noisy / impacting reed valves.
the lean burn which reduces the pressure at the opening of the exhaust ports (the higher thermal efficiency of the instantaneous combustion leaves less energy to the exhaust gas; at take-off the two engines run at partial load, on lean air-fuel mixture),
the minimization of the total weight (the most important, for the noise level, when the size is limited).
Thanks
Manolis Pattakos
Hello Flapping Flight (July 30, 2018)
You write:
“Manolis, detonation burning is considered when the front of the flame propagate with speed higher than the speed of the sound(it suppouse to have a initial point when the burning of the mixture starts) .”
Here is another definition of the detonation:
Quote from http://www.contactmagazine.com/Issue54/EngineBasics.html :
“Detonation: Detonation is the spontaneous combustion of the end-gas (remaining fuel/air mixture) in the chamber. It always occurs after normal combustion is initiated by the spark plug. The initial combustion at the spark plug is followed by a normal combustion burn. For some reason, likely heat and pressure, the end gas in the chamber spontaneously combusts. The key point here is that detonation occurs after you have initiated the normal combustion with the spark plug.”
End of quote.
The above definition fits with what happens in the SkyActiv-X engines of Mazda (do read the article of Mazda at https://insidemazda.mazdausa.com/press-release/mazda-next-generation-technology-press-information/ and see the images):
After the normal ignition at the spark plug (stratified charge, rich mixture around the spark plug, lean mixture in the rest chamber) an expanding fire ball (an air piston) compresses the unburned lean air-fuel mixture above the threshold for auto-ignition.
You also write:
“Mazda use spark plug to switch to conventional ignition when this is imposible in order to prevent destroying of the engine.”
Mazda uses the spark at all conditions.
At lean burn HCCI operation, the spark is the basic control means that shifts the detonation to the right crankshaft angle (see the video at https://www.youtube.com/watch?v=a82Wt53gu78 ) .
At normal progressive combustion (stoichiometric mixture) the spark operates the conventional way.
You also write:
“The problem are high load conditions when the burning goes supersonic than to prevent this you need high octane gasoline and this is only for such a regimes”
The contrary.
The SKyActiv-X engines operate better with low octane gasoline.
Why?
Because the lean mixture goes above the threshold at lower pressures / temperatures.
You also write:
“The ideal is variable compression ratio engine (VCR )and probably more than ideal :) would be the combination betwin VCR and HCCI.”
When the SkyActiv-X engine runs on stroichiometric mixture and progressive combustion (i.e. as a normal spark-ignition engine), the peak combustion pressure would be extreme (16:1 compression ratio). To prevent it, the intake valves of the SkyActiv-X engine remain open substantially after the BDC allowing a part of the charge to return to the intake manifold (it is a kind of Variable Compression Ratio wherein the intake valves (running on LIVC) do the job).
Take a look at the http://www.pattakon.com/pattakonPatBam.htm from where the attached plot is.
Thanks
Manolis Pattakos
Hello Flapping Flight (July 31 2018)
You write:
“Instant mean
with infinite speed ,there is no such a chemical reactions .
Even detonation have finite speed and create
shock waves similar to the planes crossing sound barrier.The impact of this
shock waves on the engine parts is what we hear as a knocking .”
No.
“Instant” means in a few crankshaft degrees (say 10 - 12) instead of the several dozens of crankshaft degrees (say 60 – 80 degrees) required for the completion of the conventional spark ignition combustion.
See the following GIF video: https://www.erc.wisc.edu/images/combustion-movie3.gif
See also this youtube video of Mazda: https://youtu.be/9G1eOU2Eguw
Quote from http://www.sciencedirect.com/science/article/pii/S0378382014001271
“Abstract
Homogeneous charge compression ignition (HCCI) engines have potential to provide both diesel like efficiencies and very low NOx and particulate matter (PM) emissions.
There is growing global interest in using alternative biofuels in order to reduce the reliance on conventional fossil fuels.
Therefore this experimental study was carried out to investigate performance, combustion and emission characteristics of HCCI engine fueled with ethanol and methanol and compare it with baseline gasoline fuel.
The experiments were conducted on a modified four-cylinder four-stroke engine at different engine speeds using port fuel injection technique for preparing homogeneous charge.
To achieve auto-ignition of air–fuel mixture in the combustion chamber, intake air pre-heater was used.
In-cylinder pressure data acquisition with subsequent heat release analysis and exhaust emission measurements were done for combustion and emission diagnostics.
In this paper, effect of intake air temperature and air–fuel ratio on combustion parameters, thermal efficiency, combustion efficiency, ringing intensity and emissions in HCCI engine is analyzed and discussed.
Results show that methanol and ethanol are good replacements to gasoline in HCCI combustion mode.
Image: https://ars.els-cdn.com/content/image/1-s2.0-S0378382014001271-gr3.jpgAt
End of Quote
In the above plots, what you can see for sure is that there is not infinite increase of the in-cylinder pressure rise.
You also write:
“There is no engine that will autstand real detonation for more than few minutes. So I haven't heard the sound of Mazda Skyactive engine but I'm sure they do not alaw it to go in detonation burning zone.”
Yet it runs on detonation (detonation is the “spontaneous” (not “instant”, but faster, several times faster) combustion of the end-gas (remaining fuel/air mixture) in the chamber.)
And the engine runs happily for hours in the test drives (see below).
And is to run for hundreds of thousands of miles (it is to be in mass production early 2019).
This video
https://www.youtube.com/watch?v=87c48vd9Bvk
is the test drive of a Mazda 3 powered by a prototype SkyActiv-X engine.
Listen to the engine and to the journalist – driver.
Most of the time the engine runs on HCCI mode / detonation (the feeling and the sound are as when driving a conventional spark ignition engine).
The engine is knocking only during the transition from HCCI to normal progressive combustion.
Chemists use to say: “if something happens, then it is possible”.
Well, it happens: the SkyActiv-X runs – permanently – on detonation reliably.
The only you can do is to accept it and to try to understand it.
Irrelevant but nice:
By the way, the attached image is the POGO FLYER flying upside-down in order the pilot and the passenger to look to the sky (as Yves Rossy does at 2:48 to 2:51 of the https://www.youtube.com/watch?v=Czy0pXRRZcs youtube video, flying over Dubai).
Thanks
Manolis Pattakos
Hello Flapping Flight (July 31, 2018)
You write:
“Also your
calculation on nesesary power for traveling with some particular speed aren't
correct.
They do not include the engine efficiency wich as you mentioned earlier is higher close to max engine load when on running on flat without acceleration the engines of most cars run on partial load that is why your conclusions are wrong , on the partial loads pumping loses ( engine berthing is difficult because the drosel valve is partially open )are higher as well. Also it is easy to make some wrong assumptions when do not use the right measuring tools and in constant conditions as in laboratory so any calculation based on random made assumptions or on eye observations can be very wrong.”
No.
The “necessary power for traveling with some particular speed” has nothing to do with the efficiency of the engine.
The “necessary power for traveling with some particular speed” has only to do with the resistance the surrounding imposes to the vehicle as it moves (aerodynamic resistance, rolling resistance, uphill “resistance” etc).
If the engine is inefficient, then it will consume more fuel per second in order to produce the required power, if the engine is efficient then it will consume less fuel per second in order to produce the same amount of power, but we always talk for the same power which is required to cover the existing resistances.
So reconsider and let me know where you specifically don’t get it. Because it is correct.
As for the accuracy of the measurement of the total resistance based on the slope of the road and on the “terminal velocity” the car achieves, it is more accurate than any lab measurement because it takes into account all the existing real parameters, provided you do know the real slope of the road and the actual overall weight of the vehicle.
To put it differently:
If I ask you to measure the overall resistance of your car at some speed of your choice, how long it would take in a lab, and how much accurate it would be?
Think how much more precise and accurate and easy is to find a road with constant slope (say X%), disengage the engine and leave your car (which has an overall weight of Y N) to reach its “terminal velocity” V m/sec. The overall resistances is Y*(X/100) and the power it requires is Y*(X/100)*V in kW.
By the way, if you have an accurate accelerator-meter (a cheap gadget), then you can measure the overall resistance of your car, on any road, for any speed.
For instance, suppose you want to measure the overall resistance of your car at 100mph (160Km/h, 44.4m/sec).
As you move with constant 100mpg speed (the slope of the road doesn’t matter), disengage the engine and see what the accelerator meter shows, say 2m/sec2 deceleration.
If the total mass of your car is 2200lb (1,000Kg), then the overall resistance is:
1,000Kg * 2m/sec2 = 2,000N = 440lb (it is a force)
And the power required to cover the aerodynamic and rolling resistance is:
2,000N *44.4m/sec = 88,800J/sec = 88.8kW (120bhp)
Do you want to go a little further?
If after measuring, as above, the overall resistance of your car and the power it consumes at 100mpg, you can measure the “wheel” power your engine can provide at the same 100mph speed.
How?
Immediately after the above measurement of the deceleration, press the gas pedal completely and see what the accelerator meter shows when the speed is 100mph.
Say that at 160mph the accelerator meter shows 1m/sec2 acceleration.
1,000Kg * 1m/sec = 1,000N = 450lb (force)
1,000N * 44,4m/sec = 44.4kW.
The total “wheel power” of your car engine is 88.8kW+44.4Kw=133kW=181bhp
Provided the accelerator-meter is accurate, the above measurement is more accurate / real than any dyno-meter can achieve, because the above measurement is at real conditions.
The video shows the VVA-roller Honda Civic 1600cc prototype car accelerating on a public road with the driver and a passenger.
All these are nothing but simple maths and physics.
Things are way simpler than what you think.
PS.
All the above are similarly applicable in the case of airplanes, of Personal Flying Devices etc.
Thanks
Manolis Pattakos
Hello Flapping Flight (July 31, 2018)
You write:
“Then what
you think is the difference in the combustion process when you hear the
knocking ( I suppouse it is in detonation burning mode ) and when is in silent
HCCI mode ?
Since in one of them you hear the knocking and
in another don't ,
there have to be some difference , what you
think ?”
As it seems,
in the one case (lean fuel-air mixture, compression ignition) the rate of pressure rise is lower than what is required for noticeable / catastrophic “knocking”,
while in the other case (higher rpm, not so lean mixture, not so good control over the crank angle the combustion actually begins, not so precise control on how rich the fuel-air mixture is around the spark plug, etc) the rate of pressure rise is higher causing knocking until the combustion to turn to conventional spark ignition and the compression ratio to drop (LIVC intake valves allowing a part of the charge to return to the intake manifold).
In the https://www.youtube.com/watch?v=a82Wt53gu78 youtube video (at 25’:30”) the Mazda engineer says that the specific SkyActiv-X prototype engine is tuned to operate with 87 octane gasoline and 16:1 compression ratio (the threshold for auto-ignition being ~18:1).
All the idea is to compress / heat the lean fuel-air mixture close to, but below, the threshold for auto-ignition, and then to trigger – controllably – the transition of the conditions in the combustion chamber (i.e. the pressure and temperature) above the auto-ignition threshold.
Mazda is doing this with their “expanding fireball / air-piston (SkyActivX SP-CCI).
The PatBam (at http://www.pattakon.com/pattakonPatBam.htm ) is doing this by separating and compressing a part of the mixture in a secondary chamber until it auto-ignites and then by passing it to the main combustion chamber causing the unburned fuel-air mixture to pass over its auto-ignition threshold and resulting in “spontaneous” combustion.
In the video https://www.youtube.com/watch?v=H_wkoyPRTMY
the one set of play cards represent the molecules in the cylinder when conventional progressive combustion happens (the flame front is between the falling play card and its neighbour play card that is still standing) ,
while the other set of play cards represents the spontaneous HCCI combustion wherein there is no flame front: each fuel molecule, independently, reacts with its neighbouring oxygen molecules.
It happens, so it is possible.
Thanks
Manolis Pattakos
Hello Flapping Flight (July 31, 2018)
You write:
“Briefly on60mph the engine ( because of the lower efficiency need to produce more power than your calculation shows because less of the power produced goes to the wheels and respectively opposite on full load .”
No.
You are still confused.
Things are quite simpler than what you think.
At 60mph the engine must produce a power P equal to the sum of the power Pa absorbed by the aerodynamic resistance Fa (in kN), and of the power Pr absorbed by the rolling resistance Fr (in kN).
60mph means 26.8m/sec,
so the power P the engine needs to produce is:
P = Pa + Pr = ( 26.8 * Fa + 26.8* Fr ) kW
This is “wheel power”; on its crankshaft the engine produces, say, 10% more power which is lost into the transmission, so the power Pc the engine needs to produce on its crankshaft is:
Pc = 1.1 * P = 1.1 * ( 26.8 * Fa + 26.8* Fr ) kW
There is nothing in the above calculation that relates with the efficiency of the engine.
For the following, suppose that Pc = 12kW, and that the engine has a peak power of 60kW at 6,000rpm.
EFFICIENCY:
Let’s suppose that you select the 2nd gear in the gearbox and your engine, at 60mph, operates at 6,000 rpm. The load is only 20% (=12kW/60kW) and the BTE (brake thermal efficiency) is low, say 15%.
Or let’s suppose that you select the 6th gear in the gearbox and your engine, at the same 60mph, operates at only 1,500rpm. The load is heavy (~80%, it depends on the torque curve) and the BTE is substantially higher (say 30%).
No matter what the efficiency is, in both cases the engine provides at its crankshaft the same 12kW of power required to balance the power loss due to the aerodynamic and to the rolling resistance.
In the one case the engine consumes, per second, two times more fuel than in the other case, but in both cases the power output is the same.
***********
PS / EDIT
Suppose that the lean mixture is extra lean. Say the lambda is 10 (as happens in Diesels at idling).
And you compress it to 20:1.
Detonation cannot help occurring.
But the temperature rise (and, thereby, the pressure rise) are ten times smaller than when a stoichiometric mixture detonates.
So, there are detonations and detonations.
The challenge is to exploit the good ones and avoid the catastrophic ones.
Thanks
Manolis Pattakos
Hello Flapping Flight (July 31, 2018)
Here is another video of “Engineering Explained” for the SkyActiv-X of Mazda: https://www.youtube.com/watch?v=yNSxow3W7ek
At 00’:49” it has a table (Manufacturer Adjusted Fuel Economy and Adjusted CO2 Emissions) showing Mazda on top of the engine makers regarding the mileage and the low CO2 emission of its “fleet”.
This makes more impressive the claim of Mazda that their new SkyActiv-X has 20% lower fuel consumption than their own SkyActiv-G (the current top duel efficient series of engines).
And because the BTE (brake thermal efficiency) of the SkyActiv-X engine is high not only at heavy, but also at medium and light loads, it does not fit with hybrids: if you need to operate the engine at 20% load and its efficiency is as high (or higher) as when it operates at 80% load, then the use of batteries to store any excessive amount of energy introduces unnecessary energy losses and nothing more.
In case the engine is to propel a flying device,
a 20% lower fuel consumption means 25% longer range and 25% longer flight duration with the same quantity of fuel,
or it means 20% less fuel (and fuel weight, and fuel cost) at take off for the same destination.
And if the engine besides fuel efficient is also lightweight and compact, then instead of loading your flying device with batteries, electric generators, electric motors, inverters, cables etc ( i.e. instead of making it hybrid), it is better and cheaper and more lightweight to add a second engine, say as in the PORTABLE FLYER and in the POGO FLYER.
Thanks
Manolis Pattakos
Hello all (August 1, 2018).
As it seems,
the “transparency” of the “Phase I Awards Issue” and the “clearly defined rules”,
continue in the phase II of the GoFly contest.
From the so far posts about the “equity”, it seems that nobody really knows what equity means here.
To be in the safe side, when you sign a paper / a contract, you have to consider the “worst case scenario”.
Flapping Flight’s scenario is an interesting one:
“When you
sign the agreement doesn't matter if you are the winner in the competition or
winner out of it
GoFly will be your "partner" ”
At first, the GoFly contest, with the BOEING involved as the big sponsor (remove the name “BOEING” from this contest and think if you would ever think to participate), was presented as a contest among thinkers and tinkers, with goal to make people fly.
Now it appears as a contest for lawyers.
Compare the GoFly / BOEING contest with Sikorsky’s contest for a human powered helicopter (more at https://en.wikipedia.org/wiki/Igor_I._Sikorsky_Human_Powered_Helicopter_Competition ) wherein the first who achieved “a flight duration of 60 seconds, reaching an altitude of 3 meters, with the center point of the aircraft hovering over a 10-by-10-metre square, was immediately declared the winner and took the big prize.
A clear / honest / transparent contest against the GoFly / BOEING contest.
I wonder, nobody in BOEING reads this forum?
Thanks
Manolis Pattakos
{kind=link}
{kind=link}
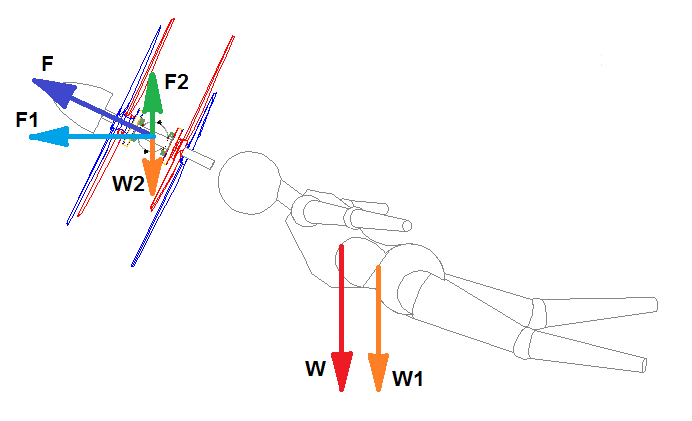{kind=link}
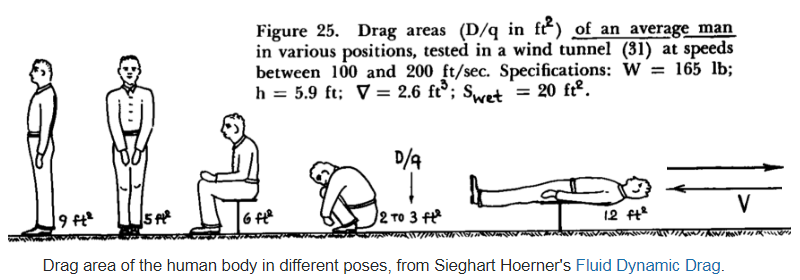{kind=link}
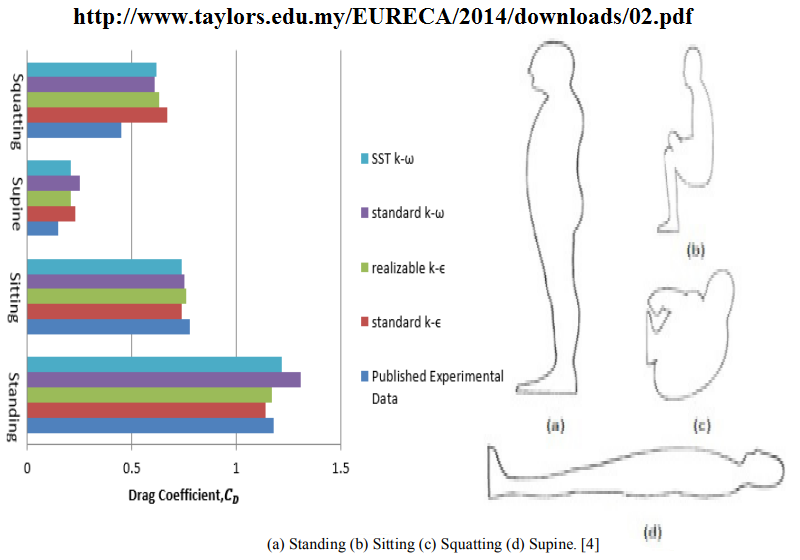{kind=link}
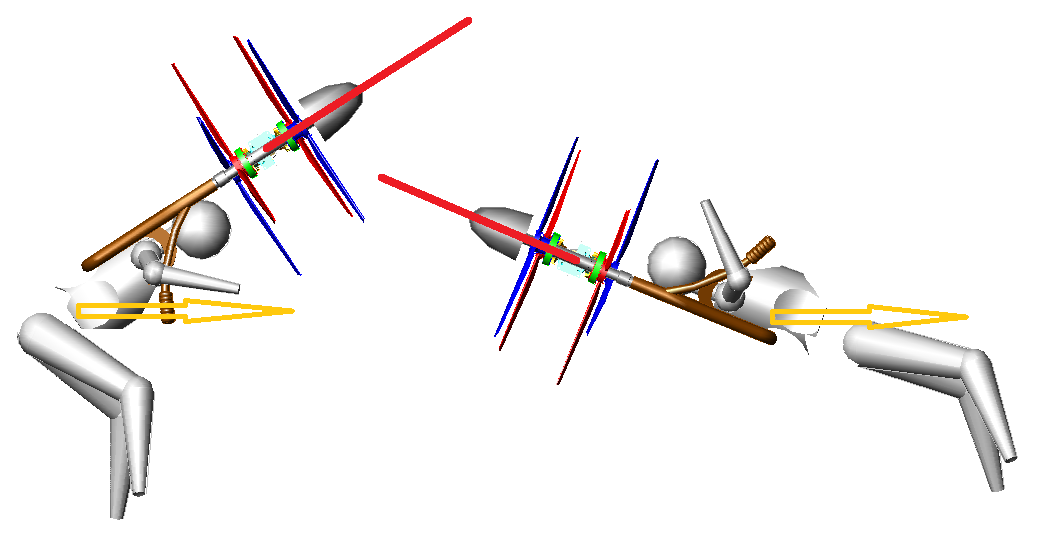{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
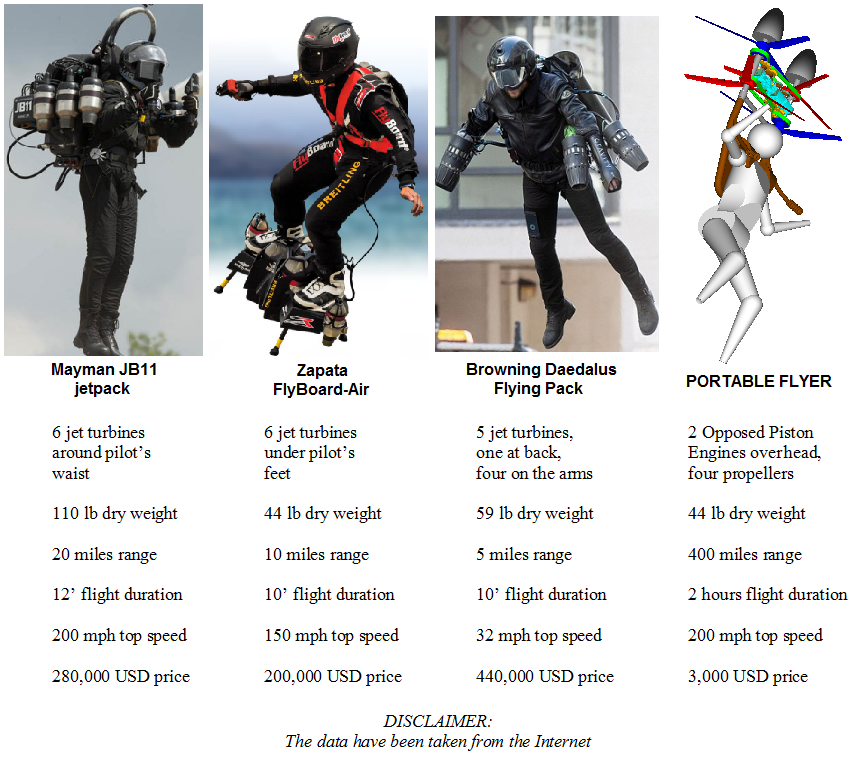{kind=link}
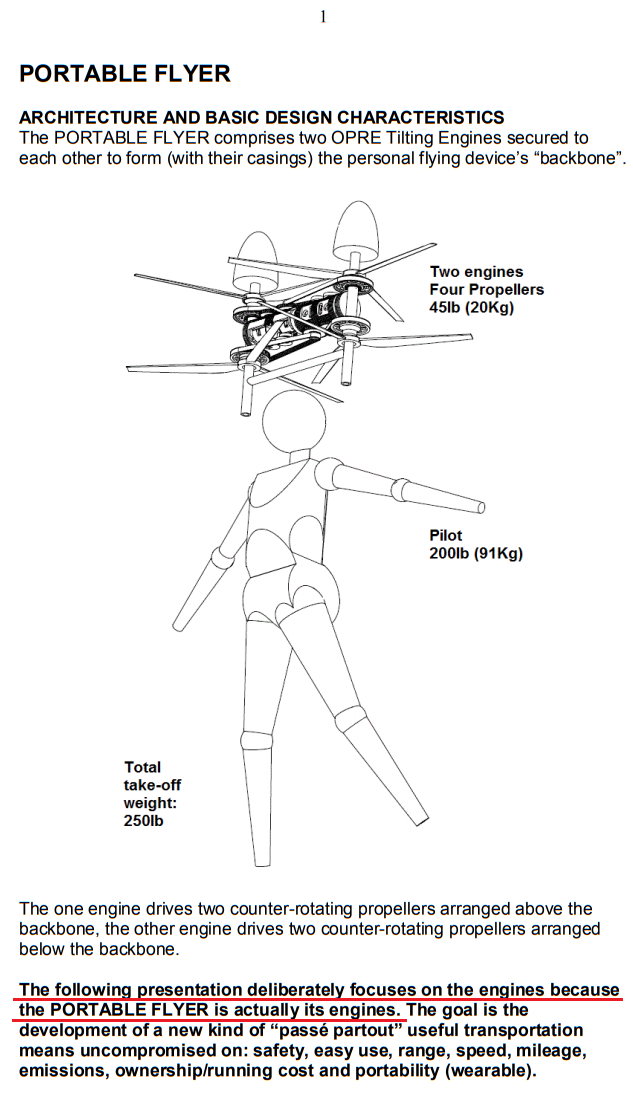{kind=link}
{kind=link}
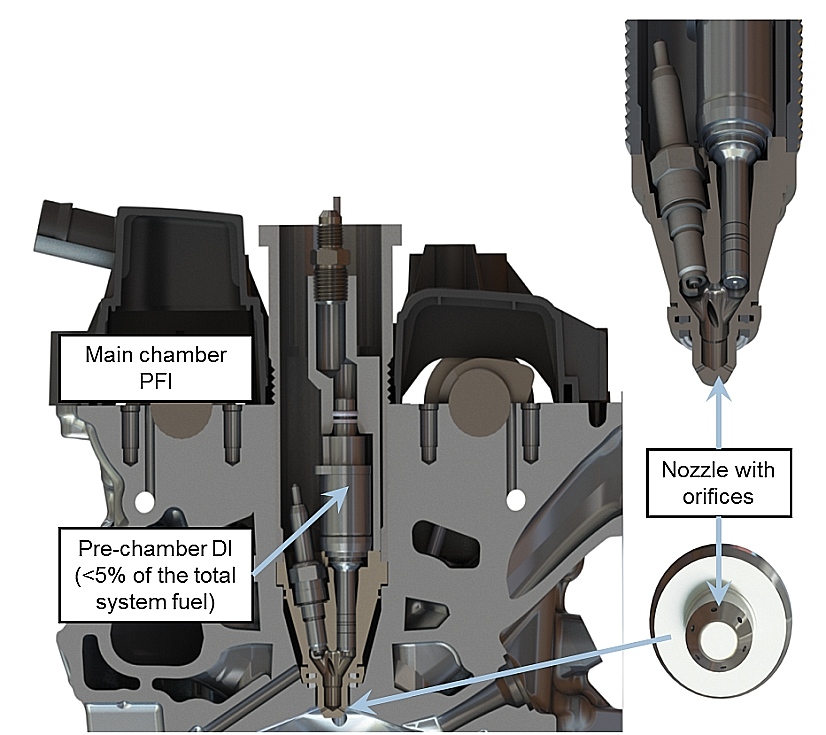{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}